Altair MotionView 2024.1 Release Notes
Altair Multibody Solutions 2024.1 Release Notes
Highlights
The 2024.1 release of Altair Multibody Solutions introduces several enhancements and
bug fixes to MotionView, MotionSolve, and their extensions. Here are some of the key
highlights:
- Deformable Curve/Surface contact support (MotionView)
- Jupyter Notebook based reports for vehicle simulation results (Vehicle Tools Extension)
- Anti-Squat and Anti-Dive user-subroutine based outputs for Two-Wheeler models (Vehicle Tools Extension)
- Real-time simulations for Vehicle models (MotionSolve)
- Frequency dependent force/torque for Frequency Response Analysis (MotionSolve)
- Higher pair forces for contact between deformable curve, deformable surface, and graphics (MotionSolve)
- MotionView to CarRealTime (New Extension)
New Features
- Deformable Curve/Surface Contact Support (MotionView/MotionSolve)
- MotionView and MotionSolve now support contact with deformable curves or
surfaces. The contact entity has been extended to select a deformable
curve graphic or a deformable surface graphic. Additionally, the
deformable curve graphic has been enhanced to include radius as an
attribute, allowing it to represent pipes or tubes. This feature is
beneficial for modeling a variety of applications, including contacts
with hoses, piping, and wiring harnesses.
Figure 1. 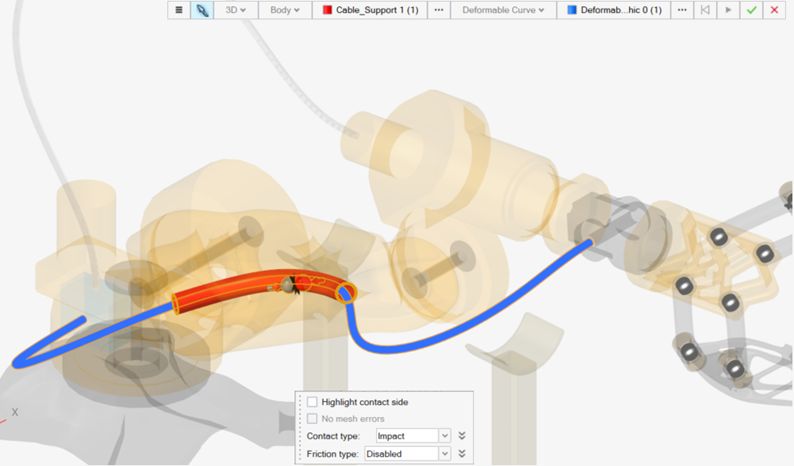
Figure 2. 
- Jupyter Notebook Based Reports for Vehicle Simulations (Vehicle Tools Extension)
- The Vehicle Tools Extension adds an option to review vehicle simulation
results using Jupyter Notebooks. Jupyter Notebook is an open-source web
application that allows you to create and share documents containing
live code, equations, visualizations, and narrative text. You can access
these reports using the ribbon icon shown below. These reports are an
add-on to the already existing HyperGraph/HyperView reports.
Figure 3. Access Jupyter Notebook Reports 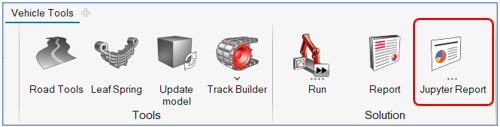
- Anti-Squat and Anti-Dive Outputs for Two-wheeler Models (Vehicle Tools Extension)
- The Vehicle Tools Extension now includes in-built Anti-Squat/Anti-Dive
outputs to models created using the Assembly Wizard. These are available
only for Two-wheeler models. The calculations are based on the geometry
of the steering handle, tire contact patches, and sprocket-chain
geometry. When you build a Two-wheeler using the Assembly Wizard, these
outputs are created in a dedicated System under Instrumentation.
Figure 4. Anti-Squat/Dive Outputs 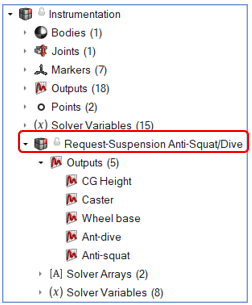
- Real-time Simulation for Vehicle Models (MotionSolve)
- MotionSolve 2024 introduced an experimental feature for real-time simulation of car models created using the Assembly Wizard from the Vehicle Tool Extension. Please refer to the 2024 release notes for more information. In this release, the feature has been officially launched for cars and small trucks. This feature will be extended to additional vehicle types in future updates.
- In vehicle models built using the Car/Small Truck library, a new
“Real-Time Compliant” option is displayed in the Entity Editor for
supported events. Enabling this option exports the solver deck with the
necessary instructions for MotionSolve to execute real-time simulation.
Figure 5. 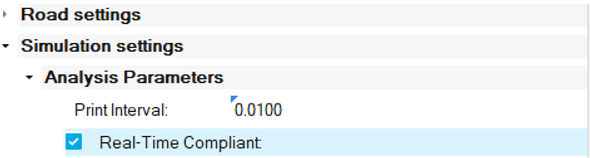
- Frequency Dependent Force/Torque for Frequency Response Analysis (MotionSolve)
- MotionSolve introduced Frequency Response Analysis (FRA) in release 2023.1. In MotionView 2024, UI support was added to set up and execute this analysis. Please refer to the 2023.1 and 2024 release notes for more details.
- Higher Pair Forces for Contact Between Deformable Curves, Deformable Surfaces, and Graphics (MotionSolve)
- MotionSolve now supports higher pair force to define contact between
deformable curves, deformable surfaces, and graphics. These forces are
faster than Force_Contact but limited to single point
contact. Supported entities include:
- Force_PTdCV - Defines the contact force between a deformable curve and point.
- Force_DCVCV - Defines the contact force between two deformable curves.
- Force_DCVSF - Defines the contact force between a deformable curve and a deformable surface.
- Force_GRADCV - Defines the contact force between a deformable curve and graphic.
- Force_GRADSF - Defines the contact force between a deformable surface and graphic.
This feature is currently not supported in MotionView.
Enhancements
- Run and Export Updates (MotionView)
- From this version onward, the default file type for an offline run with
MotionSolve is set to use Python instead of XML. In line with this
change, the following changes have been made to the Analysis Settings
dialog of the Run tool.
- The offline run solver format that was under Global Simulation Settings is now available upfront in the Analysis Settings.
- The Solver Script choice is moved into the Global Simulation Settings dialog.
- By default, the offline run solver format is Python. It can be changed to XML.
- Enhancements to Frequency Response Analysis (MotionView)
- In version 2024, MotionView added support for Frequency Response Analysis by providing a constant value as input in the frequency domain using the FrequencyInput entity. In this version, the FrequencyInput capability has been extended to provide non-linear inputs such as a Curve or an Expression.
- Progress Bar for Jupyter Notebook (MotionSolve)
- The simulation progress can be viewed as a progress bar while running MotionSolve simulations in Jupyter Notebook.
- Added Sensor ID and Sensor Label in MRF and ABF (MotionSolve)
- MotionSolve now writes the sensor ID and the sensor label in the MRF and ABF files for HyperGraph to properly display sensor signals when two sensors have the same name.
- Added licwait Option in MotionSolve (MotionSolve)
- MotionSolve now supports licwait, when specified waits for the specified number of hours when sufficient units of the license are not available.
- Cutoff Results in Linear Analysis (MotionSolve)
- MotionSolve now supports cutting off results in a linear analysis using frequency (maximum_freq and minimum_freq). The cutoff type (cutoff_type = "DAMPED | UNDAMPED") can be based on damped or undamped natural frequencies of the system.
Changes
- Primitive Graphics Updates (MotionView)
- The ribbon for creating primitive graphics has been updated. A single
“Primitives” ribbon icon brings in a secondary ribbon with individual
icons for creating each of the primitive graphics.
Figure 6. 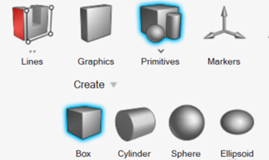
- Changes to Outputs (MotionView/MotionSolve)
-
- The option “Use note on Ouput as label for plt” is available in the Global Simulation Settings under Analysis Settings in the MotionView Run ribbon. This option can be used to replace the output label with the notes in the output.
- MotionSolve has added the flag abf_req_comment_only to ResOutput, which controls how the output request names are written to the ABF files.
- MotionSolve has added the flags abf_yrequest_label and plt_yrequest_label to ResOutput, which controls whether the label or comment of a request should be written as the output request names are written to the ABF and PLT files.
- Request names for outputs with cnames (component names) are now consistent with other outputs, with the label having the prefix “REQ/id”.
Extensions
- Machinery Tools Extension (v2.0)
- The Machinery Tools extension provides higher-level modeling entities
that form an integral part of larger machinery or equipment. This is an
update to the previous release that adds the following new features:
- A new "Cables" library has been introduced that enables the modeling and simulation of winches, pulleys, anchors, and cables wrapped around them in various configurations. The formulation supports winch geometry and inertia fluctuation and pulley sliding contact, with longitudinal tension coupling between pulleys.
- Additional example models have been introduced that demonstrate the usage of the "Cable" library.
- The "Gears" library has been reduced to "Helical Gearset" and
"Planetary Gearset".
Figure 7. 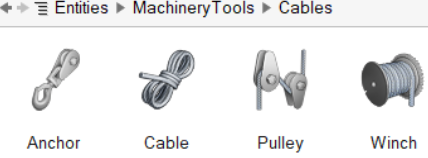
- MotionView to CarRealTime (New)
- The MotionView to Car Real Time extension provides a tool to export the
suspension characteristics of vehicle models to be used in Altair
TwinActivate Car Real Time (TwinActivate-CRT) and VI-Grade Car Real Time
(VI-CRT).
Figure 8. 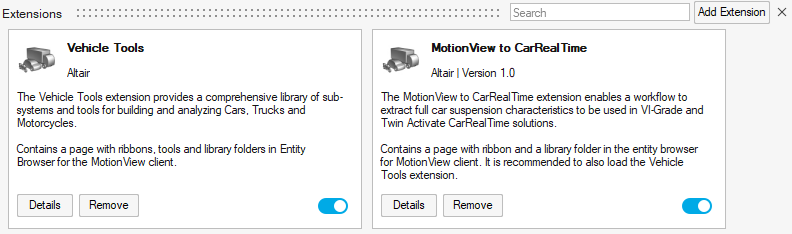
- The extension loads a page in MotionView with a ribbon and a library
folder in the entity browser containing two full vehicle events,
TwinActivate_CRT and VI_CRT. These events support full vehicle models
with the driver created using the car and small trucks library in
MotionView’s Assembly Wizard.
Figure 9. 
Figure 10. 
Known Issues
- Jupyter reports do not plot signals that are constructed using math operations on other signals. Curve math is not supported in these reports.
- A PLT file generated from a real-time simulation does not have the correct results.
- Some output signals in real-time simulation will be zero.
- Some real-time models with multiple FMU or steep events may not run in real-time.
- Some real-time models do not run on Linux.
Resolved Issues
- Selection highlight in context stays after undo.
- Section headers in the Entity Editor are blank when selecting a flexbody when the panel is on.
- ADF file written into the XML file is not correct when exported for HyperStudy.
- Expressions in the Data Summary import file are imported as a string resulting in an error when evaluating.
- MotionView crashes while turning on the U column of a 2D parametric curve in the Entity Editor.
- NLFE-based belt pulley does not solve.
- Edge option in Create curve using Edge/Surface does not work when you select a single edge to extract a curve.
- The default analysis cannot be activated from the Entity Editor once deactivated.
- Creating a sub-folder on the Run preference option results in the solver deck written to the parent directory in ADAMS solvermode.
- Options type data members in Datasets are greyed out in the Entity Editor for the ADAMS solvermode.
- Dataset property of type Table is not visible in the Entity Editor.
- A run using msolve Python fails for the library car model with the aerodynamic force system.
- Application error is encountered when clicking the Open File icon on Forms.
- Components within the assembly hierarchy get incorrect names when imported via HyperMesh.
- The number of steps mentioned for a frequency response analysis in MotionView does not get written correctly to XML.
- Deleting flexible bodies does not remove the graphics from the screen.
- Undoing a deleted system crashes MotionView.
- Reports for a rear-suspension KnC event were not plotting.
- User-defined input expressions for Jack motions were not saved to the MDL file in KnC events.
- Vertical tire forces reported in models with Fiala tires were more than the actual reaction during static simulation.
- Fixed the contact pressure output if one of the graphics in the contact is a flexible body.
- Improvements in the contact results vector flickering while animating contact simulations.
- mspost always writes MODAL H3D even when h3d_format = "NODAL".
- Unit scaling issue in a flexible body for modal loads.
- Issue with sequential analysis with flexible bodies with large deformations.
- Removed dependencies of edem.fmu on the H3D library to avoid DLL conflicts when running MotionSolve FMU with multiple third-party applications.
- MotionSolve now captures errors from FMU while initializing and terminates the simulation.