
新機能
MotionSolve 2024の新機能について説明します。
Altair Multibody Solutions 2024 リリースノート
主な特長
Altair Multibody Solutions 2024リリースには、MotionViewおよびMotionSolveの以下の機能強化およびバグ修正が含まれています:
- UndoとRedo機能(MotionView)
- 周波数応答解析(MotionView/MotionSolve)
- (試験的機能)部分構造の弾性体ボディを持つベルトプーリ(MotionView/MotionSolve)
- (試験的機能)車両モデルのリアルタイムシミュレーション(MotionSolve)
- デュアルモーター搭載の電動パワートレイン(車両ツール拡張機能)
- ケーブルライブラリ (機械ツール拡張機能)
- モデリングウィザードの変更(MotionView)
新機能
- UndoとRedo機能(MotionView)
- MotionViewセッション内で、エンティティの作成、変更、削除の取り消しが可能になりました。Ctrl+Zで元に戻し、Ctrl+Yで元に戻した操作をやり直すことができます。注: Undo機能はダイアログでは使用できません。
- 周波数応答解析(MotionView/MotionSolve)
- 周波数応答解析(FRA)機能は、2023.1からMotionSolveで使用できるようになりました。MotionViewは、この解析をセットアップして実行するためのUIサポートを提供します。
- FrequencyInputエンティティは、周波数応答解析の入力を定義するために使用できます。
図 1. 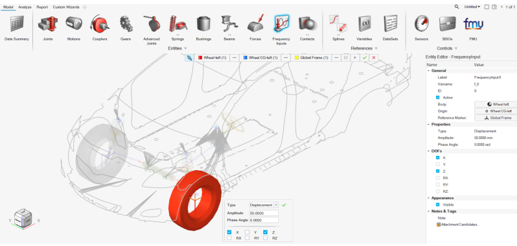
- サポートされる入力タイプ:変位、速度、加速度、または力。
- 入力は周波数領域で、振幅、位相、方向(DOF)を与えます。
- アナリシスのエンティティエディターは、以下の解析タイプをサポートしています:周波数応答解析、静解析+周波数応答解析。
図 2. 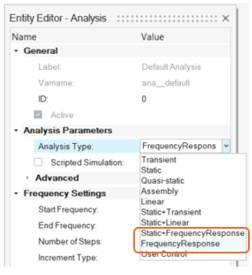
- FrequencyInputエンティティは、周波数応答解析の入力を定義するために使用できます。
- (試験的機能)部分構造の弾性体ボディを持つベルトプーリ (MotionView/MotionSolve)
- 部分構造の弾性体ボディを採用した新しいベルト形状が、ベルトプーリーシステム作成ツールに試験的に導入され、利用できるようになりました。この定式化では、ベルトは固定ジョイントで接続された一連の線形(CMS)弾性体として化されます。この方法は、NLFE定式化よりも高速で、離散化された剛体定式化よりも忠実度の高い解を提供します。
- (試験的機能)車両モデルのリアルタイムシミュレーション(MotionSolve)
- MotionSolveは、MotionViewウィザードを使用して作成された車両モデルのリアルタイムシミュレーションをサポートするようになりました。MotionViewのスイッチでこの機能を有効にすることができ、リアルタイムパフォーマンスを達成するために手動でモデルを縮小する必要がなくなります。弾性体ボディ、複雑な形状、多数の自由度を持つモデルを、ワンクリックでリアルタイムにシミュレーションできます。ここでいう「リアルタイム」とは、MotionSolveシミュレーションに必要な計算時間と指定された終了時間の比が1以下であることを意味します。これは試験的な機能であるため、ウィザードのすべての機能がサポートされているわけではなく、リアルタイムでないパフォーマンスやシミュレーションの失敗が発生する可能性があることに注意してください。しかし、これらの問題は将来のリリースで対処される予定です。その間、必要に応じてリアルタイム機能を無効にすることができます。
-
図 3. 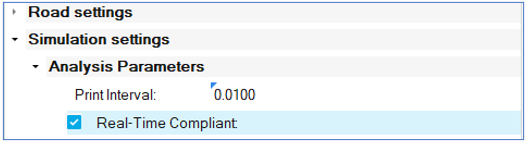
- MQTTプロトコル(MotionSolve)
- MotionSolveは現在、msolve APIを通じてMQTTプロトコルをサポートしています。MQTTはMessage Queuing Telemetry Transportの略で、IoT向けに開発されたOASIS標準のメッセージングプロトコルです。これは、リモートデバイスが最小限のコードフットプリントとネットワーク帯域幅で通信できるようにする、軽量のパブリッシュ/サブスクライブメッセージングトランスポートとして設計されています。MQTTは、自動車、製造、電気通信、石油・ガスなど、さまざまな業界で広く採用されています。msolveのMQTTサポートは、ブローカーを介してMotionSolveモデルと他の仮想または物理デバイス間の双方向メッセージングを容易にします。この機能により、複数の機器に信号を簡単にブロードキャストすることができ、IoTアプリケーションにとって価値ある機能となっています。
-
図 4. 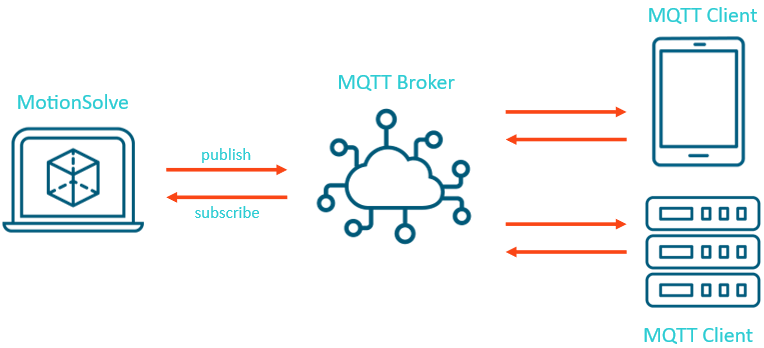
- デュアルモーター搭載の電動パワートレイン(車両ツールの拡張機能)
- MotionViewは、自動車/小型トラック車両ライブラリにデュアルモーター搭載の電動パワートレイン(FMU)モデルを含めるオプションを追加しました。このオプションは、" Full vehicle with Driver "および " Four wheel drive"のドライブライン構成で利用可能で、AssemblyウィザードのPowertrainメニューからアクセスできます。
-
図 5. 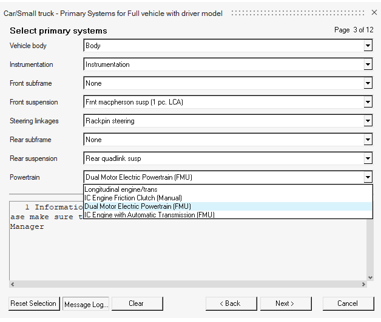
-
図 6. 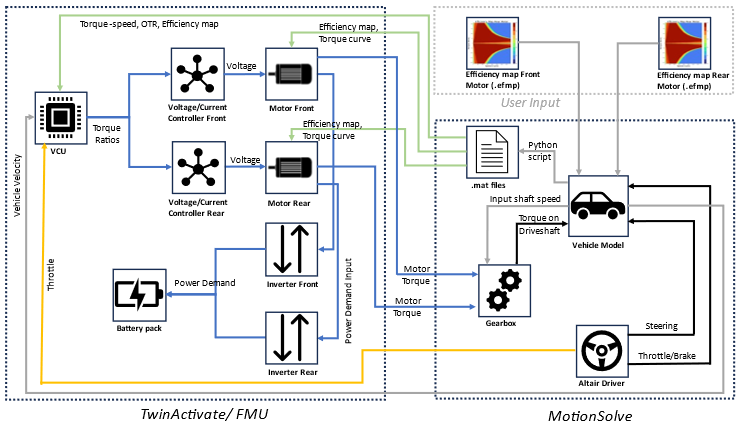
機能強化
- カーブ用エンティティエディター
- Curveエンティティ用に、パネルに代わるエンティティエディタ―が追加されました。エディターには、カーブを可視化して編集するための新しいEdit/Show Curveダイアログもあります(Data sourceが Valuesに設定されているカーブのみ)。
-
図 7. 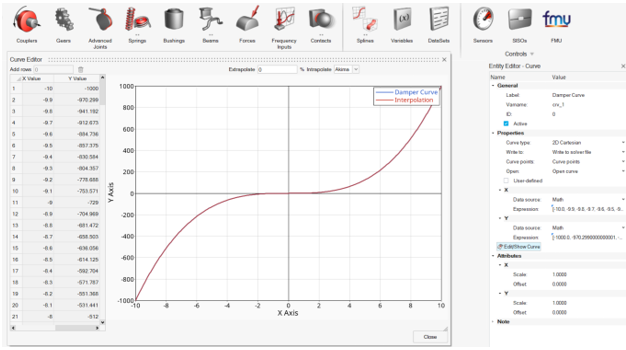
- Wizardライブラリ(MotionView)
- Wizardライブラリには、Wizardのサンプルが含まれています。このライブラリを使用して、独自のWizardライブラリを作成することができます。標準インストールに含まれていたVehicleライブラリは、Vehicle Tools Extensionの一部となりました。これは、メニューからアクセスする拡張機能マネージャーからオンにすることができます。
-
図 8. 
- PythonAPIの更新(MotionView)
- PythonのAPIがWizardライブラリに登録できるようになりました。以下のAPIコマンドは、mviewモジュールの下でWizardライブラリの登録と設定に使用できます。
- Cosin F-Tire Version 2024-1 (車両ツール拡張機能)
- Altair MotionSolveは、車両シミュレーションに使用されているCosin F-Tire 2024-1の最新バージョンをサポートするようになりました。
- 履帯・クローラ―ビルダー - 履帯の対称モデルと新しい出力(車両ツール拡張機能)
- 履帯のモデリングプロセスの効率を高めるために、左右対称オプションがに追加されました。
-
図 9. 
- 車両のハーフモデルのキネマティック&コンプライアンス(KnC)イベント用レポートテンプレート(車両ツール拡張機能)
- すでに、新しい車両のキネマティック&コンプライアンスイベントがエンティティブラウザに導入されており、これによりイベントパラメータのワークフローが大幅に改善されました。従来のバージョンでは、自動レポートは2軸車、または4輪車に対してのみ利用可能でした。
- 軟質土壌路面のグラフィック長さ定義(車両ツール拡張機能)
- 軟質土壌の路面ファイルで、路面基準マーカーからの路面グラフィックの長さを指定するための新しい引数が利用できるようになりました。
-
図 10. 
- 傾斜車両の車線変更操作を改善するMIN_RADIUSパラメータ(車両ツール拡張機能)
- 車線変更イベントとスラロームイベントに "MIN_RADIUS "属性が追加されました。この属性は、計画されたパスに沿った最小半径を指定するために使用することができ、制御アルゴリズムは、パスフォロワー制御用のスプラインを設計し、適合させるために内部的に使用します。
-
図 11. 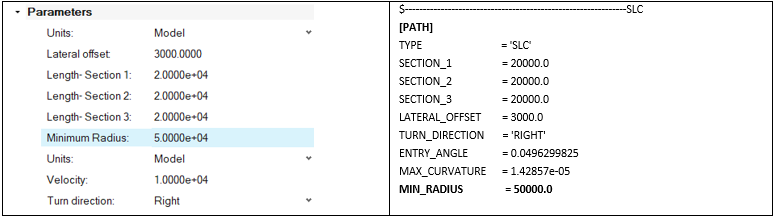
- FMUパス(MotionSolve)
- MotionSolve FMUの実行中、複数のパスを設定しないように、すべてのパスと環境変数がALTAIR_FMU_ROOTから派生するようになりました。
- IDによる複数のポストユーザー出力リクエストの利用を拡張(MotionSolve)
- MotionSolveは、IDによる複数のポストユーザー出力要求をサポートしており、ファイル、プロット、アニメーションなど、さまざまな形式で複数のカスタム出力結果を書き込むことができます。
変更点
- Abaqusソルバーモードの非推奨
- ABAQUSソルバーモードは廃止されました。
- NLFE SpringとNLFE Stabarの廃止(MotionView)
- NLFEを使用したスプリングとスタビライザーバーを作成するツールは廃止されました。
- Multi-disciplinary ツール拡張機能(MotionView)
- Multi-disciplinary Toolsのプリファレンスは、Altair Exchangeからダウンロードして拡張マネージャ―経由で追加できる拡張機能として利用できるようになりました。
- MotionSolve Python(MotionView)へのエクスポート
- MotionViewは、MotionSolveのPython APIであるmsolveを使用して、モデルをライブで、またオプションでオフライン(デフォルト以外)で解法します。さらに、Pythonソルバーデックをエクスポートするにはを使用します。以前は、Pythonファイルの書き方には2つのスタイルがありました。ライブ実行では、フラットでノンパラメトリックなスタイルのソルバーデックを使用し、オフライン実行とエクスポートでは、エンティティ間のパラメトリックな関係を維持するスタイルを使用しました。
- CADトランスレーターアップデート
- Parasolid以外の様々なCADフォーマット(STEP、IGS、CATIAなど)の変換に使用されるサードパーティ製コンポーネントが新しいバージョンにアップグレードされました。このアップグレードは、以前に見られたCADの読み取り速度の低下やジオメトリの変換不良の問題に対処しています。
- エンティティブラウザでの静的荷重解析(車両ツール拡張機能)
- Car/Small truckおよびHeavy truckライブラリを使用して作成された車両のハーフモデルの静的荷重解析が、の下のエンティティブラウザに含まれるようになりました。.
- エンティティブラウザでのタイヤのエンベロープの解析(車両ツール拡張機能)
- Car/Small truckおよびHeavy truckライブラリを使用して作成された車両のハーフモデルのタイヤエンベロープ解析が、の下のエンティティブラウザに含まれるようになりました。 .
-
図 12. 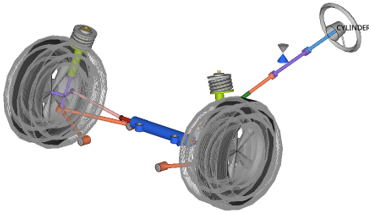
- ハーフビークルおよびフルビークル解析のための完全なワークフロー(車両ツール拡張機能)
- 静的荷重解析とタイヤエンベロープ解析がエンティティブラウザに移行し、エンティティエディタでパラメータを編集できるようになったため、このリリースでは解析タスクウィザードのサポートが削除されました。
-
図 13. 
- HyperMeshによるCAD/FEインポートの変更点
- インタラクティブモードでHyperMeshを使用してCAD/FEをインポートする際に表示されるHyperMeshのユーティリティメニューが、MVUtilsリボンに移行されました。
-
図 14. 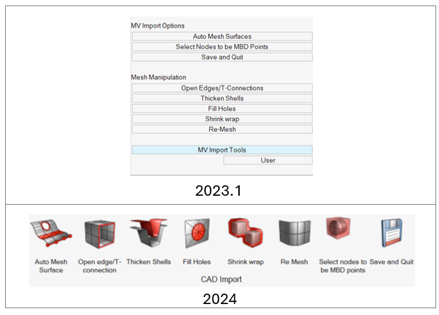
- 整理されたバイナリ(MotionSolve)
- サードパーティ製バイナリとの競合を避けるため、Verticalバイナリとタイヤ関連バイナリがmsautoフォルダの下に配置されました。
拡張機能
- ケーブルライブラリ (機械ツール拡張機能)
- 機械ツール拡張機能のバージョン2.0がで利用できるようになりました。バージョン1.0で利用可能だったベアリングとギアのライブラリに加え、このバージョンではケーブルライブラリが追加されました。
-
図 15. 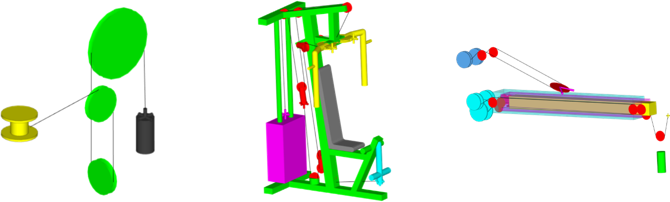
解決した問題
- 実行後、エンティティエディタの解析終了時間がデフォルトにリセットされない問題。
- 他のエンティティを作成した後にModel Wizardを使用してシステムを作成すると、セグメンテーションエラーが発生する問題。
- Solver_FilenameとSolver_File_basenameのデータメンバーが、Pythonを使用したソルバーデックのエクスポート/実行時に設定されない問題。
- ソルバーデックのエクスポート中にテンプレートが事前評価されると、Solver_FilenameおよびSolver_File_basenameデータメンバが正しく設定されない問題。
- 外部定義ベースの解析を保存する際のアプリケーションエラー。
- 剛体グループをダブルクリックしても、編集コンテキストメニューが表示されない問題。
- CreateBlankModel TCL コマンドでMotionViewがクラッシュする。
- MarkerPairとBushingPairのエンティティエディタで、左右を切り替えた後にOrientation情報が表示されない問題。
- エンティティエディターのアドバンスト選択ダイアログを使用しても、データセットタイプのシステムアタッチメントを解決できない問題。
- ガイドバーのマーカーコレクターをアタッチメントファイルの属性にすると、アタッチメントファイルの属性としてではなく、解決されたマーカーに設定される問題。
- マーカの向きを指定するときに参照するポイントのポイント座標に関する問題。
- NodesとModesダイアログの弾性体ボディ入力の節点許容差情報が保存されない問題。
- ソルバーへのエクスポート時に、バックスラッシュとスペースを含むコンポーネント名が正しく処理されない問題。
- Create line from pointsを使用して作成された曲線は、点とのパラメトリックな関係を維持しない問題。
- コンプライアントジョイントおよびBushing エンティティエディターで、ユーザー式が表示されない問題。
- FMU Entity EditorのStatic holdオプションが変更後にリセットされる不具合。
- Vehicle Tools Extensionを読み込むと、FMU Exportダイアログのモデルツリーが空になる問題。
- Solver ArrayエディターのPlant Input/Outputで、ソルバー変数ボタンが間違ったデフォルトカウントで表示される。
- Flexbody Nodes and Modesダイアログで節点の許容誤差を変更する際に、Pythonウィンドウでアプリケーションエラーが発生する。
- フェイスを使用して抽出された曲線は、適切にスケーリングされない。
- 片側の非対称ブッシュペアが、もう片側で選択されているカーブを表示する問題。
- で設定した場合、"Run Offline "はRun Motion Analysisダイアログボックスから変更できない問題。
- Action onlyのチェックボックスをオフにしてもオンにしても、Forces コンテキストのアクション専用ガイドバーが復元されない。
- NLFEの変数名を変更すると、エンティティプロパティがデフォルト値に戻る問題。
- ユーザー定義プロパティのLocal fileウィジェットが、DLL名の入力として文字列を受け付けない問題。
- ボディが存在しない点をCGとして参照すると、ライブ実行中にMotionViewがクラッシュする。
- getnodecoordinatesを使用した式が、モデルの読み込み時や弾性体ボディの更新時に評価されない。
- ソルバーデックのエクスポートのショートカットキーCtrl+Eが機能しない。
- センチメートルを長さの単位として使用した場合に、エンティティエディターフィールドの単位テキストが正しくない。
- SmartUQから生成されたFMUを追加すると、MotionViewがクラッシュする。
- hide_in_postOutlineグラフィックスが機能しない。
- ユーザー定義テンプレートは、Pythonでのライブ実行中またはオフライン実行中には実行されない。
- モデルにボディへの荷重出力が含まれている場合、ライブ実行では.meta ファイルが作成されない。
- msolve Python でボックスグラフィックスの向きが正しく転送されない。
- Damperグラフィックがソルバーに転送されない。
- NLFEを含むモデルが実行されない。
- 以前の結果を参照する弾性体ボディを含むモデルを読み込むと、クラッシュすることがある。
- Nポストイベントを持つ車両モデルがライブ実行に失敗する問題。
- 異なるフォルダー内の実行は、実行履歴の下の異なるツリーに表示される問題。
- 終了時刻を変更したモデルを再実行すると、結果レビューでアニメーションが正しく表示されない。
- インターフェース節点のポイントは、弾性体ボディの親システムの下では作成されない。
- ポイントを設計変数にすると、MotionView がクラッシュする。
- 二輪車の車線変更イベントは、速度が大きく非常にタイトなターンになる車線パラメータの場合に失敗する。
- KnCとn-PostイベントのJackが、コンタクトパッチにポストを配置するために、タイヤの半径を正しく検出しない。
- デュアルタイヤを含むサスペンションモデルは、n-Post車両イベントで適切にサポートされませんでした。デュアルタイヤをシングルタイヤに置き換える必要がありました。
- USE_MODE = 514/534のシーメンス製タイヤを使用したモデルの加速度出力の初期スパイクに関する問題。
- EDEMの連成シミュレーションでは、剛体の力計算が弾性体ボディと同様に各三角メッシュにかかる力に基づいて行われたため、剛体モデルの性能に影響が出ました。現在のMotionSolveのバージョンでは、剛体は変形しないため、EDEMからの力は形状全体に対して計算されます。
- HyperViewがEDEMモデルと結果の読み込みをネイティブにサポートするため、EDEM2H3dコンバータを削除しました。
- save_incrementを使用中にXMLファイルに保存されないデータがある。
- MotionSolve-EDEM連成シミュレーションの問題。MotionSolveが、遅延開始連成シミュレーション(連成シミュレーション開始時間>0の場合)で弾性体ボディを含む場合に機能しませんでした。