
PlanetaryGearSet
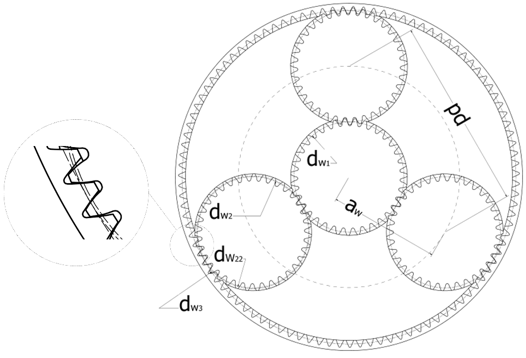
モデル要素遊星はすば歯車セットを指定します。太陽歯車、リング歯車、N個の遊星歯車による、(N + 2)のはすば歯車の構成。
クラス名
PlanetaryGearSet
説明
下の表に、PlanetaryGearSetクラスの属性をまとめます。
| Variable | 型 | 注釈 | 記号 |
|---|---|---|---|
| id | Int() | 一意の識別番号。 | |
| label | Str() | 歯車セット要素の記述子。 | |
| rm | Reference("Marker", required=True) | 歯車セット要素の参照マーカー。このマーカーは、太陽およびリング歯車の中心を指します。歯車の向きを定義します(参照マーカーのz軸は歯車のアキシャル軸です)。 | |
| rm_2 | Reference("Marker") | 最初の遊星歯車の参照マーカー。このマーカーは、z軸の方向がrm(軸方向)と同じである必要があり、その原点がrmのz軸から定義される平面上(rmのz軸に対する平面内)にある必要があります。動作中心距離は、2つの参照マーカーから計算され、歯車セットに対する入力として使用されます(コメント11をご参照ください)。 | |
| module | Double(required=True) | 歯車の歯直角モジュール。 | |
| number_of_planets | Int(3) | 歯車セットの遊星の数。遊星歯車の干渉が生じないことを確認してください(コメント11をご参照ください)。 | |
| num_of_teeth_1 | Int(required=True) | 太陽歯車の歯数(コメント12をご参照ください)。 | |
| num_of_teeth_2 | Int(required=True) | 歯車2の歯数(コメント12をご参照ください)。 | |
| num_of_teeth_3 | Int(required=True) | 歯車2の歯数(コメント12をご参照ください)。 | |
| gear_ratio | Double(required=True) | リング歯車と太陽歯車のギア比 (コメント13をご参照ください)。 | |
| pressure_angle | Double(required=True) | 歯直角圧力角(度単位)。 | |
| helix_angle | Double(required=True) | ピッチ円直径でのねじれ角(度単位)。 | |
| width_1 | Double(required=True) | 太陽歯車の幅。 | |
| width_2 | Double(required=True) | 遊星歯車の幅。 | |
| width_3 | Double(required=True) | リング歯車の幅。 | |
| addendum_coefficient | Double(1.0) | 基準ラックの歯先のたけ係数。 | |
| dedendum_coefficient | Double(1.25) | 基準ラックの歯元のたけ係数。 | |
| tool_tip_radius_coefficient | Double(0.38) | 基準ラックの工具先端半径係数。 | |
| hub_diameter_1 | Double(0.0) | 太陽歯車の内径。 | |
| hub_diameter_2 | Double(0.0) | 遊星歯車の内径。 | |
| hub_diameter_3 | Double(0.0) | リング歯車の外径。 | |
| x1 | Double(0.0) | 太陽歯車の転位係数(コメント6をご参照ください)。 | |
| x2 | Double(0.0) | 遊星歯車の転位係数(コメント6をご参照ください)。 | |
| x3 | Double(0.0) | リング歯車の転位係数。 | |
| j1 | Double(0.04) | 太陽歯車の円周方向のバックラッシュ比。範囲は0.03~0.05とする必要があります(コメント2をご参照ください)。 | |
| j2 | Double(0.04) | 遊星歯車の円周方向のバックラッシュ比。範囲は0.03~0.05とする必要があります(コメント2をご参照ください)。 | |
| j3 | Double(0.04) | リング歯車の円周方向のバックラッシュ比。範囲は0.03~0.05とする必要があります(コメント2をご参照ください)。 | |
| g1_connection_part | Reference("Part", required=True) | 固定ジョイントで太陽歯車に結合されるパート。 | |
| g3_connection_part | Reference("Part", required=True) | 固定ジョイントでリング歯車に結合されるパート。 | |
| carrier_part | Reference("Part", required=True) | 遊星歯車が回転ジョイントの拘束によって結合されるパート。 | |
| num_curve_segments | Int(10) | 各歯車のインボリュート形状に沿ったメッシュセグメントの数。不均一メッシュを使用した場合、このパラメータは常に偶数になります(この形状は、2つの対称な領域に分割されます)。 | |
| num_width_segments | Int(20) | 各歯車の幅に沿ったメッシュセグメントの数。 | |
| non_uniform_factor | Double(1.2) | メッシュの不均一性の係数を定義します。Triamesh要素の長さは、前の要素長さにこの係数を掛けた値となります。均一メッシュには1.0を使用します。 | |
| density | Double() | 歯車の材料の密度(4をご参照ください)。 | |
| contact_creation | Bool(True) | 2つの歯車間のIMPACT接触をアクティブにします(Contact IMPACTをご参照ください)。 | |
| contact_stiffness | Double(1e5) | 歯車の接触の剛性パラメータを指定します(Contact IMPACT stiffnessをご参照ください)。 | |
| contact_exponent | Double(2.1) | 歯車の接触の力変形特性の指数を指定します(Contact IMPACT exponentをご参照ください)。 | |
| contact_damping | Double(1.0) | 歯車の接触における減衰力の生成に使用する最大減衰係数を指定します(Contact IMPACT dampingをご参照ください)。 | |
| contact_dmax | Double(0.1) | 歯車の接触に全減衰が適用される貫通を指定します(Contact IMPACT dmaxをご参照ください)。 | |
| contact_coulomb_friction | Enum("ON OFF DYNAMICS_ONLY", default="OFF") | 歯車の接触摩擦力の計算に使用する摩擦力モデルを指定します(Contact IMPACT coulomb_frictionをご参照ください)。 | |
| contact_mu_static | Double(0.2) | 歯車の接触において摩擦が静的状態になっている場合の静摩擦係数を定義します(Contact IMPACT mu_staticをご参照ください)。 | |
| contact_mu_dynamic | Double(0.1) | 歯車の接触において摩擦が動的状態になっている場合の動摩擦係数を定義します(Contact IMPACT mu_dynamicをご参照ください)。 | |
| contact_stiction_transition_velocity | Double(1.0) | 静摩擦係数mu_staticが適用される滑り速度を定義します(Contact IMPACT mu_stiction_transition_velocityをご参照ください)。 | |
| contact_friction_transition_velocity | Double(1.5) | 動摩擦係数mu_dynamicが適用される滑り速度を定義します(Contact IMPACT mu_stiction_transition_velocityをご参照ください)。 | |
| export_graphic | Bool(False) | 歯車の形状を2つの*.stlファイルにエクスポートします。これらのファイルはHyperMeshで再メッシュすることができます。 | |
| export_parameters | Bool(False) | 計算した歯車セットと歯車のパラメータを*.jsonファイルにエクスポートします。 |
g = PlanetaryGearSet (
id=1,
label='Planetary gear set',
rm=Marker(part=B_Ground),
rm_2=Marker(part=B_Ground, qp=[center_distance, 0, 0], rm=rm),
g1_connection_part=b_sun_shaft,
g3_connection_part=b_ring_shaft,
carrier_part=b_carrier_shaft,
module=2.0,
number_of_planets=3,
pressure_angle=20.0,
helix_angle=15.0,
num_of_teeth_1=35,
num_of_teeth_2=35,
num_of_teeth_3=-103,
gear_ratio=-2.943,
width_1=20.0,
width_2=20.0,
width_3=20.0,
addendum_coefficient=1.0,
dedendum_coefficient=1.25,
tool_tip_radius_coefficient=0.38,
x1=0.07,
x2=0.098,
x3=-1.4288,
j1=0.04,
j2=0.04,
j3=0.04,
hub_diameter_1=0.0,
hub_diameter_2=0.0,
hub_diameter_3=0.0,
num_width_segments=20,
num_curve_segments=10,
non_uniform_factor=1.2,
density=7.85e-06,
)