
MV-1024:MotionSolveモデル内でのユーザーサブルーチンの使用
本チュートリアルでは、運動を定義する際のユーザーサブルーチンの利点について学びます。
- 重要な論理的条件によって決定される物理現象を描写するため
- 複雑な式を明示的な形式で定式化することが実際困難な場合
- C/C++やFortranのようなプログラミング言語や、Tcl、Python、Rubyなどのインタープリターを使ったよりシンプルなプログラミングを最大限に活用するため
MotionSolveで自身のサブルーチンを使用するには、下記の手順に従います:
-
ユーザー定義のモデリングエンティティを含むC/C++、FORTRAN、TclまたはPythonソースファイルを作成します。
サポートされているソルバーサブルーチンのリスト、および、モデル内におけるサブルーチンのセットアップと使用のガイドラインについては、MotionSolveユーザーズガイドをご参照ください。
-
C/C++またはFortran用のユーザーサブルーチンをコンパイルおよびリンクすることによってDLLを取得します。もしくは、TclまたはPython用にソースファイルを直接使用します。
MotionSolveは、2つの別々のレベルのユーザーDLLを提供し、アルゴリズムは、個々に指定されたライブラリから開始し、各シンボルを理解していきます。
- 要素レベルのDLL(most specific)
モデリング要素定義内にDLLの名称を指定します。
- マシンレベルのDLL
環境変数MS_USERSUBDLLを作成し、それをDLLファイルに設定することが可能です。この環境変数は、MotionSolveがインストールされた際に自動的に定義されるものではありません。ただし、<インストールディレクトリ>\hwsolvers\usersub\subdll\win32\フォルダー内にFortran DLLおよびC/C++ DLLが用意されています。これは、ユーザーサブルーチンDLLを使用するテストモデルの一部をユーザーが実行できるようにするためです。
注: どのDLLを読み込むかは、"most specific"の規則、すなわち、1つ目は2つ目に優先することに基づきます。 - 要素レベルのDLL(most specific)
-
自身のマルチボディモデル内の対応するエンティティが"ユーザー定義"のものとなり、自分のDLLを参照するように修正します。これを行うには、以下の2つの方法があります:
- MotionViewインターフェース内でエンティティを修正
- MotionSolve XMLファイルを編集する。
上記のいずれを選択したかにかかわらず、1つまたは複数のエンティティがユーザー定義となったXMLファイルが生成されます。
例えば、xmlファイル内のカプラーモデリング要素の場合:
<Constraint_Coupler id = "1" type = "TwoJoint" i_marker_id_joint1 = "30603030" j_marker_id_joint1 = "30602031" body1_id_joint1 = "30603" body2_id_joint1 = "30602" joint_type_joint1 = " " i_marker_id_joint2 = "30603040" j_marker_id_joint2 = "30604040" body1_id_joint2 = "30603" body2_id_joint2 = "30604" joint_type_joint2 = " " usrsub_param_string = "USER(-8.5)" usrsub_dll_name = "C:/work/testsub.dll"> </Constraint_Coupler>usrsub_dll_name引数は、このカプラー要素について、要素レベルのDLLとしてC:/work/testsub.dllを定義します。任意の要素で異なるDLLを参照できるように定義できます。
XMLファイル内のカプラーモデリング要素は、下記のとおり定義することも可能です:
<Constraint_Coupler id = "1" type = "TwoJoint" i_marker_id_joint1 = "30603030" j_marker_id_joint1 = "30602031" body1_id_joint1 = "30603" body2_id_joint1 = "30602" joint_type_joint1 = " " i_marker_id_joint2 = "30603040" j_marker_id_joint2 = "30604040" body1_id_joint2 = "30603" body2_id_joint2 = "30604" joint_type_joint2 = " " usrsub_param_string = "USER(-8.5)" usrsub_dll_name = "NULL"> </Constraint_Coupler>本演習の場合、MotionSolveは、MS_USERSUBDLL環境変数の値により定義されているマシンレベルのDLLを探します。
- MotionSolveを実行し、シミュレーション中で適切なDLLをピックアップしていることを確認します。
本演習に必要なモデルファイルPendu_model.mdlを、mbd_modeling\motionsolve自身の<作業ディレクトリ>にコピーしてください。
式を用いて運動を定義
- MotionViewの新しいセッションをスタートします。
- <作業ディレクトリ>からMDLモデルファイルPendu_model.mdlを読み込みます。
-
Project BrowserでModelを右クリックし、を選択(またはツールバーからMotions
 を 右クリック)します。
を 右クリック)します。
- 変位の運動をPendulum BodyとGround Bodyの間の回転ジョイントに追加します。
- Propertiesタブをクリックします。
- 変位の運動に、式3.142* TIMEを設定します。
-
Outputs
 をクリックし、Outputsパネルを表示させます。
出力リクエストを確認します。
をクリックし、Outputsパネルを表示させます。
出力リクエストを確認します。 -
Run
 をクリックし、Runパネルにアクセスします。
をクリックし、Runパネルにアクセスします。
- Save and run current modelをクリックし、自身の<作業ディレクトリ>に進みます。MotionSolve入力XMLファイルとして名称をPendu_model.xmlと指定します。
- Simulation type:がTransientに設定されていることを確認します。
- End Timeに1を指定します。
-
Check
 をクリックし、モデリングエラーがないかをチェックします。
をクリックし、モデリングエラーがないかをチェックします。
- エラーのないことが確認できたら、Runボタンをクリックします。
- 実行が終了すると、Animateボタンがアクティブになります。Animateをクリックし、シミュレーションのアニメーション表示を確認します。
- Runパネルで、Plotをクリックし、出力リクエストの時刻歴を見ます。
MOTSUBユーザーサブルーチンを用いた運動の定義
本ステップでは、ユーザーサブルーチンMOTSUBを使用します。このユーザーサブルーチンは、DLL ms_csubdll.dll内でコンパイル、リンクされています。マシンレベルのこのDLLは、インストレーションに用意されています。Windows 64-bitプラットフォームの場合は、DLLは以下の場所にあります:<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\.
マシンレベルのDLLとして、ms_csubdll.dllを使用します。
-
環境変数MS_USERSUBDLLを作成し、値をDLLファイルにセットします。
-
Variable value:を<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\ms_csubdll.dllに設定します。
図 1. 
-
Variable value:を<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\ms_csubdll.dllに設定します。
-
MotionViewモデルウィンドウ内で、これより前のステップからのPendu_model.mdlが開いたまま、Motionsパネルに進みます。
- ConnectivityタブでUser-defined propertiesチェックボックスにチェックマークを入れます。
-
User-Definedタブをクリックし、
 テキストボックスに`USER(100001,5,2)`と入力します。
テキストボックスに`USER(100001,5,2)`と入力します。
図 2. 
注: 要素レベル(specific)のDLL/Interpreter関数を使用するには、Use local dll and function nameチェックボックスにマークを入れ、フォルダーアイコン を使ってDLLを指します。
を使ってDLLを指します。文字列
`USER(100001,5,2)`は、MOTSUBユーザーサブルーチンに引数を渡すために使用されます。MOTSUBユーザーサブルーチンは下記のとおりUSER(branch_id, par1, par2)内でパラメータpar1およびpar2を使って運動を計算します:motion_val= par1*TIME^par2 -
Fileメニューからを選択します。
Export Modelパネルが表示されます。
- ファイル名をPendu_model_usersub.mdlと指定します。
- MotionViewの現在のセッションを閉じ、新しいセッションを開始します。保存されているモデルPendu_model_usersub.mdlを開きます。
-
Run をクリックし、Runパネルにアクセスします。
- Save and run current modelをクリックし、自身の作業ディレクトリに進みます。MotionSolve入力XMLファイルとして名称をPendu_model_usersub.xmlと指定します。
- Simulation type:がTransientに設定されていることを確認します。
- End Timeに1を指定します。
- MainタブでCheckボタンをクリックし、モデリングのエラーをチェックします。
- エラーのないことが確認できたら、Runボタンをクリックします。
- プロットウィンドウ内で、ABFファイルPendu_model_usersub.abfからの結果をプロットし、Pendu_model.abfファイルからの結果を上書きします。
- アニメーションウィンドウ内で、Load ModelパネルのOverlayオプションにチェックマークを入れます。
-
Load model folderアイコン
 を使って、ファイルPendu_model_usersub.h3dを選択します。
を使って、ファイルPendu_model_usersub.h3dを選択します。
-
Applyをクリックします。
これで、既存のアニメーションが新しいアニメーションで上書きされます。
図 3. 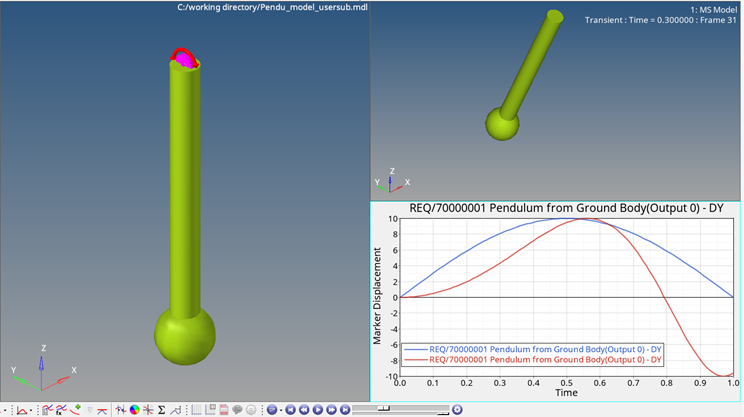
注: usrsub_param_stringの値が“USER(3.142, 1)”に設定されている場合、step 2からの結果はstep 1からの結果と同じになります。 - 作業ディレクトリから、MotionSolve XMLファイルPendu_model.xml(step 1で保存されたもの)を開きます。
-
XMLファイルをブラウズし、Motion_Jointブロックを探します。
<Motion_Joint id = "301001" label = "Motion 0" type = "EXPRESSION" val_type = "D" expr = "3.142*TIME" joint_id = "301001" joint_type = "R" /> - 作業ディレクトリからMotionSolve XMLファイルPendu_model_usersub.xmlを開きます。
-
XMLファイルをブラウズし、Motion_Jointブロックを探します。
<Motion_Joint id = "301001" label = "Motion 0" type = "USERSUB" val_type = "D" usrsub_param_string = "USER(100001,5,2)" usrsub_dll_name = "NULL" usrsub_fnc_name = "MOTSUB" joint_id = "301001" joint_type = "R" />注: 上記ブロック内のusrsub_dll_nameパラメータの値がNULLにセットされている場合、MotionSolveはマシンレベルDLL内のサブルーチンを探します。このDLLは、MS_USERSUBDLL環境変数によってMotionSolveに渡されます。 -
要素レベルのDLLを使用するには、usrsub_dll_nameパラメータの値をDLLを指すよう設定します。
usrsub_param_stringパラメータは、ユーザーサブルーチンに引数を渡すために使用されます。たとえば、MOTSUBユーザーサブルーチンは下記のとおりUSER(branch_id, par1, par2)内でパラメータpar1およびpar2を使って運動を計算します:
motion_val= par1*TIME^par2MotionSolveはユーザーサブルーチンから戻された値を使用して運動を計算します。