OS-T:1920 片持ち梁の大変位解析
本チュートリアルでは、OptiStructを使用して細長い片持ち梁のマルチボディダイナミクス解析(時刻歴解析)を実行します。
開始する前に、このチュートリアルで使用するファイルを作業ディレクトリにコピーします。
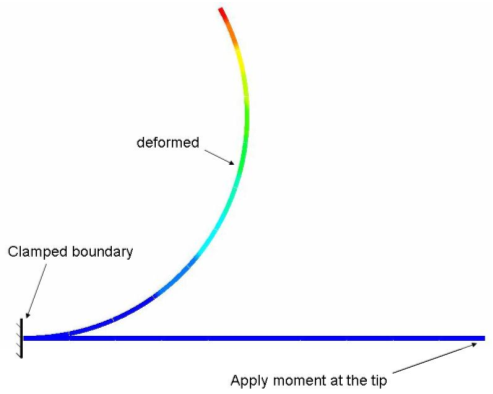
HyperMeshを使用して、片持ち梁の既存の有限要素モデルを読み込み、モデルのセットアップ(ジョイントの作成、載荷など)を行います。片持ち梁の大変形結果のポスト処理は、HyperViewを使って行います。図 1.
本演習では、ジョイント、PFBODY、MBMNTCおよびマルチボディダイナミクス用サブケースの作成方法について学習します。
梁モデルは10個の異なる弾性体(PFBODY)から成り、各弾性体は固定ジョイントと剛体要素(RBE2)で結合されます。図 2. RBE2のモデリング
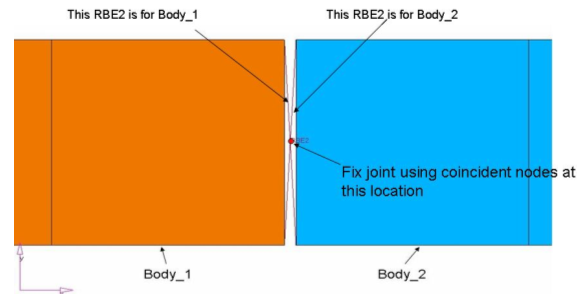
各弾性体の境界に2つのRBE2要素が定義されています(境界面で各弾性体に1つ)。固定ジョイントは、重複する各RBE2要素の独立節点である重複節点を使用して作成されます。
HyperMeshの起動とOptiStructユーザープロファイルの設定
-
HyperMeshを起動します。
User Profilesダイアログが現れます。
-
OptiStructを選択し、OKをクリックします。
これで、ユーザープロファイルが読み込まれます。ユーザープロファイルには、適切なテンプレート、マクロメニュー、インポートリーダーが含まれており、OptiStructモデルの生成に関連したもののみにHyperMeshの機能を絞っています。
モデルのオープン
- をクリックします。
- 自身の作業ディレクトリに保存したcantilever_beam_MBD.hmファイルを選択します。
-
Openをクリックします。
cantilever_beam_MBD.hmデータベースが現在のHyperMeshセッションに読み込まれます。
モデルのセットアップ
ジョイントの作成
-
コンポーネントjointsを作成します。
-
重複節点を作成します。
-
modeling windowで、body_1の上部左側角を3回クリックします。
その節点の座標値(x=、y=、z=)が表示されます。
図 3. 重複節点の場所 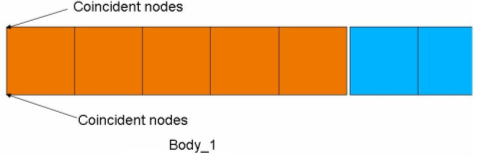
-
modeling windowで、body_1の上部左側角を3回クリックします。
-
menu barからJointsをクリックします。
Jointsパネルが開きます。
-
body_1の左側角に固定ジョイントを作成します。
図 4. 固定ジョイント 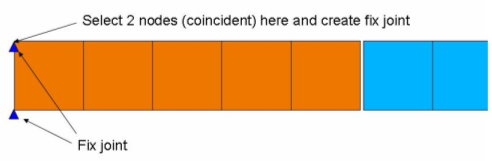
- body_1の下部左側角に固定ジョイントを作成します。
-
各コンポーネントの境界位置に固定ジョイントを作成します。
- joint typeをfixedに設定します。
- Body_1とBody_2間の境界を拡大表示します。
- first terminalとして重複節点の1つを、second terminalとして別の重複節点を選択します。
- createをクリックします。
図 5. 固定ジョイント 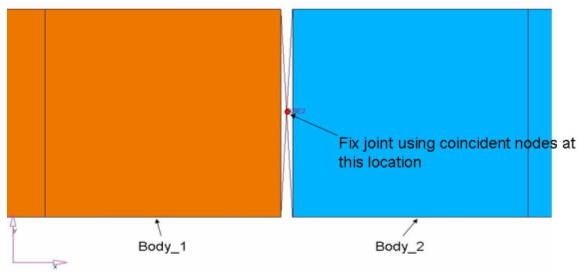
- 各ボディの境界位置に固定ジョイントを作成します。
- returnをクリックします。
PFBODYの作成
PFBODY は、マルチボディシミュレーションのための弾性体定義です。PFBODYは剛体を、有限要素のプロパティ、要素、節点のリストとは別に 定義します。
モデルにはground bodyとは別に10のボディがあります。
- Analysisページからbodiesをクリックします。
- createサブパネルを選択します。
- body=欄にpfbdy_1と入力します。
- type=をクリックしPFBODYを選択します。
- プロパティセレクターを使って、body_1を選択します。
- bycollectorをクリックしrigid_1を選択します。
- number of modesをnmodes=に設定し、3と入力します。
- createをクリックします。
- parametersサブパネルを選択します。
- dampingをdval=に設定し、10.0と入力します。
- updateをクリックします。
-
各弾性体のPFBODYを作成します。
body_2について、以下の定義を行います:
- body=にpfbdy_2と入力します。
- props=にbody_2を選択します。
- elems=にrigid_2を選択します。
parametersサブパネルで全てのPFBODYの減衰が10.0に定義されていることを確認してください。pfbody_4に対しては、nmodes= 欄に7と入力します。 - returnをクリックします。
DTIとUNITSの作成
- menu barからをクリックし、Control Cardsパネルを開きます。
- DTI_UNITSをクリックします。
-
単位系を、図 6に示すとおり定義します。
図 6. 
- returnを2回クリックし、メインメニューに戻ります。
MBSIM荷重コレクターの作成
-
mbmoment荷重コレクターを作成します。
-
sim荷重コレクターを作成します。
MBMNTCの作成
-
モーメントの荷重タイプをMBMNTCに変更します。
- Analysisページからload typesをクリックします。
- moment=をクリックしMBMNTCを選択します。
- returnをクリックします。
MBMNTCはカーブに基づいたモーメントです。 -
カーブを作成します。
-
XYテーブルに図 7のように追加します。
図 7. 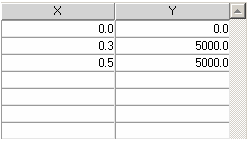
-
XYテーブルに図 7のように追加します。
- Model BrowserのCollectorsフォルダーでmbmomentを右クリックし、context menuからMake Currentを選択します。
-
モーメントを作成します。
-
節点セレクターを使って、梁の右側角の節点を2つ選択します。
図 8. MBMNTC 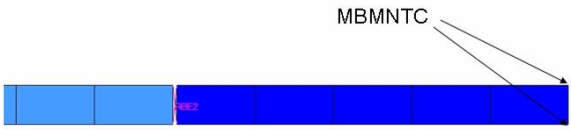
-
節点セレクターを使って、梁の右側角の節点を2つ選択します。
-
<uicontrol>File</uicontrol><uicontrol>Import</uicontrol><uicontrol>Solver Deck</uicontrol>をクリックします。これで独立したシェル(DOSまたはUnix)が表示され、OptiStructジョブが開始されます。
解析が正常に終了した場合、プロンプトにエラーメッセージは出力されません。プロンプトにメッセージProcessing completeが表示されると、最適化は終了です。
荷重ステップの作成
- Model Browserで右クリックしcontext menuからを選択します。
- NameにDynamicと入力します。
- Analysis typeを<uicontrol>Linear Static</uicontrol>に設定します。
-
MBSIMを定義します。
-
MBSIMに、Unspecified >
 を選択してアドバンスト選択を開きます。
を選択してアドバンスト選択を開きます。
- ダイアログで、SIMを選択し、OKをクリックします。
-
MBSIMに、Unspecified >
- Subcase Optionsでを選択します。
-
MLOADに、Unspecified > を選択してアドバンスト選択を開きます。
- ダイアログで、mbmomentを選択し、OKをクリックします。
ジョブのサブミット
-
AnalysisページからOptiStructパネルをクリックします。
図 9. OptiStructパネルへのアクセス 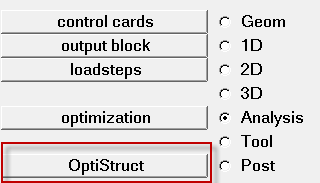
- save asをクリックします。
-
Save Asダイアログで、OptiStructモデルファイルを書き出す場所を指定し、ファイル名としてcantilever_beam_MBDと入力します。
OptiStruct入力ファイルには、拡張子 .femが推奨されます。
-
Saveをクリックします。
入力ファイル欄には、Save Asダイアログで指定されたファイル名と場所が表示されます。
- export optionsのトグルをallにセットします。
- run optionsのトグルをanalysisにセットします。
- memory optionsのトグルはmemory defaultにセットします。
- OptiStructをクリックし、OptiStructジョブを開始します。
結果の表示
このステップでは、HyperMeshのOptiStructパネルで起動するHyperView内で結果を可視化します。
HyperViewは有限要素解析(FEA)、マルチボディシステムシミュレーション、ビデオと工学データのための完全なポストプロセッシングと表示の環境です。
-
AnalysisページのOptiStructパネルから、をクリックします。
Load modelとLoad resultsの右側入力欄にcantilever_beam_MBD.h3dのパスとファイル名が表示されます。これは、.h3dフォーマットにはモデルと結果データの両方が含まれているためです。
モデルと結果は現在のHyperViewウィンドウに読み込まれます。
-
<uicontrol>Axis</uicontrol>ツールバーアイコン
 をクリックします。
をクリックします。
- Results type:の下で、Displacement(v)を選択します。
- Applyをクリックします。
-
playback controlsの横のパネル内にあるAnimation Controlsを使ってアニメーションを開始 / 停止します。
図 10. 
-
Animate Modeが
 (Transient)にセットされていることを確認します。
(Transient)にセットされていることを確認します。
- Start/Pause Animationアイコンをクリックし、アニメーションを開始します。
- アニメーションの再生中に、一番下のスライダを使って、アニメーションのスピードをコントロールします。
- Start/Pause Animationアイコンを再度クリックし、アニメーションを停止します。
図 11. 
-
Animate Modeが
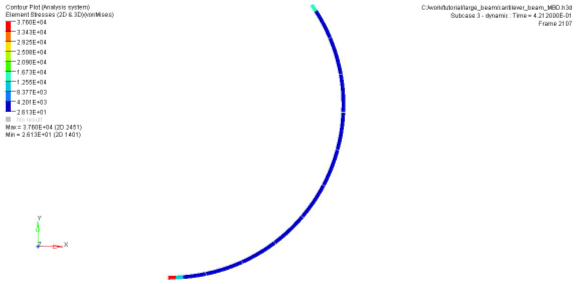
- Contour panelのResults typeの下で、Element Stresses [2D & 3D]を選択します。
- Applyをクリックします。
-
Start/Pause Animationアイコンをクリックし、アニメーションを開始します。
図 12.