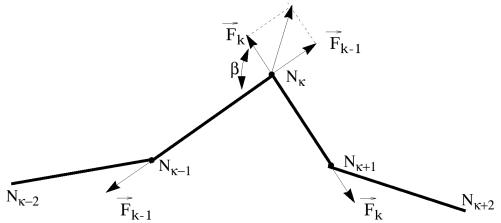
図 1 . Nodes are numbered from 1 to
n
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaaaa@36CE@
k
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaaaa@36CE@
k to node Nk+1 ).
Averaged Force
The averaged force in the multistrand is computed as:
Linear spring
F
=
K
L
0
δ
+
C
L
0
δ
˙
Nonlinear spring
F
=
f
(
ε
)
⋅
g
(
ε
˙
)
+
C
L
0
δ
˙
or, if
g
function identifier is 0:
図 2 .
F
=
f
(
ε
)
+
C
L
0
δ
˙
or, if
f
function identifier is 0:
図 3 .
F
=
g
(
ε
˙
)
+
C
L
0
δ
˙
Where,
ε
ε
=
L
−
L
0
L
0
Where,
L
0
Force Into Each Strand
The force into each strand
k
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaaaa@36CE@
F
k
=
F
+
Δ
F
k
Where,
Δ
F
k
is computed an incremental way:
図 4 .
Δ
F
k
(
t
)
=
Δ
F
k
(
t
−
1
)
+
K
l
k
0
δ
ε
k
−
K
L
0
δ
ε
with
l
k
0
k
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaaaa@36CE@
δ
ε
=
ε
(
t
)
−
ε
(
t
−
1
)
δ
ε
k
=
δ
t
u
k
⋅
(
v
k
+
1
−
v
k
)
Where,
u
k
k to node
Nk+1 .
Assuming:
図 5 .
l
k
l
k
0
=
L
L
0
Where,
l
k
k
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaaaa@36CE@
Therefore,
式 3 reduces
to:
図 6 .
Δ
F
k
(
t
) = Δ
F
k
(
t − 1
) +
K
l
0
(
δ
ε
k
L
l
k
− δ ε
)
Friction
Friction is expressed at the nodes: if
μ
is the friction coefficient at node
k
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4zaaaa@36E2@
, the pulley friction at node N
k is expressed
as:
図 7 .
Δ
F
k
(
t
)
=
Δ
F
k
(
t
−
1
)
+
K
l
k
0
δ
ε
k
−
K
L
0
δ
ε
When equation 式 6 is not satisfied,
|
Δ
F
k
−
1
−
Δ
F
k
|
(
2
F
+
Δ
F
k
−
1
+
Δ
F
k
)
tanh
(
β
μ
2
)
All the
Δ
F
k
(k=1, n-1) are modified in order to satisfy all conditions
upon
Δ
F
k
−
1
−
Δ
F
k
(k=2, n-1), plus the following condition on the force integral
along the multistrand element:
図 8 .
∑
k
=
1
,
n
−
1
l
k
(
F
+
Δ
F
k
)
=
L
F
This process could fail to satisfy
式 6 after the
Δ
F
k
(
k
=
1
,
n
−
1
)
modification, since no iteration is made. However, in such a
case one would expect the friction condition to be satisfied after a few time steps.
注: Friction expressed upon strands (giving a friction coefficient
μ
along strand
k
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaaaa@36CE@
) is related to pulley friction by adding a friction
coefficient
μ
/
2
upon each nodes N
k and
N
k+1 .
Time Step
Stability of a multistrand element is expressed as:
図 9 .
Δ
t
≤
C
k
2
+
ρ
l
k
K
k
−
C
k
K
k
,
∀
k
with
K
k
=
M
a
s
s
o
f
t
h
e
m
u
l
t
i
s
t
r
a
n
d
L
0
and (assuming
式 4 ):
図 10 .
K
k
=
max
(
K
l
k
0
,
F
l
k
−
l
k
0
)
=
max
(
K
L
l
k
L
0
,
F
L
l
k
(
L
−
L
0
)
)
図 11 .
C
k
=
(
f
(
ε
)
d
g
d
ε
˙
(
ε
˙
)
+
C
)
l
k
0
=
(
f
(
ε
)
d
g
d
ε
(
ε
˙
)
+
C
)
L
l
k
L
0