Overview of how the MotionView applications interface with the Abaqus
solver.
Guidelines for Exporting MDL Model Files to Abaqus
MotionView MDL models can be exported to an Abaqus .inp file.
Gravity, Units, and Solver Parameters
MotionView works with gravity, units, and solver parameters for Abaqus.
Gravity
Gravity is an implicit data set, meaning that its definition is created
automatically by MotionView. The values for gravity can be accessed
through the Forms panel while in the
Misc system of a model. Default values for
gravity are set in the std_inc file that is part of
the MotionView installation. A Templex template is also included in
std_inc. This template allows you to write the
gravity to the Abaqus input file.
Units
Although MotionView is a "unitless" interface, it is often required that
the units you are working with be communicated to the solver input deck.
Similarly, it may be necessary to ensure that the units are consistent.
Therefore, the definitions of mass, length, time, and force are
automatically generated by MotionView. To access this, go to the
Forms panel and select
Units under the Misc
system. The default values as well as the Templex template used for
exporting units to Abaqus are generated from the
std_inc file.
Solver Parameters
Solver parameters vary considerably between different solvers and are
stored in datasets. There are two ways to generate solver parameter
datasets:
Data sets and their corresponding forms are created within the
analysis task in the MDL library. If you are creating your own
MDL library, you need to verify that the solver parameter
datasets are defined in each analysis task.
No library is used to construct a model. This includes
interactive model construction and the manual editing of .mdl
files, or a combination of both. For this case, MotionView
automatically generates the system containing the solver
parameters based on a definition within the
std_inc file.
MDL Statement Mapping
Overview of the mapping between MDL and the corresponding Abaqus entities.
Note: All property data for these entities are set in corresponding
*Set() statements.
MDL Statement
Abaqus Entity
*ActionOnlyForce()
CLOAD, AMPLITUDE (Time Function only)
*ActionReactionForce()
CLOAD, AMPLITUDE (Time Function only)
*AtPointJoint()
Joint (Connector Section)
*BallJoint()
Joint (Connector Section)
*Beam()
B31(Timoshenko beam)
*Body()
Rigid Body
*Bush()
Connector Behavior
*CoilSpring()
Connector Behavior
*ControlSISO()
None
*Coupler()
None
*Curve()
AMPLITUDE
*CVJoint()
Joint + Constant Velocity (Connector Section)
*CylJoint()
Slot + Revolute (Connector Section)
*FixedJoint()
Weld (Connector Section)
*Graphic()
None
*HookeJoint()
Joint+Universal (Connector Section)
*InlineJoint()
Slot (Connector Section)
*InplaneJoint()
Slide-Plane (Connector Section)
*Marker()
NODE + ORIENTATION
*Motion()
Connector Motion (Time Function only)
*OrientJoint()
Align (Connector Section)
*Output()
Output, History
*ParallelAxisJoint()
Revolute (Connector Section)
*PerpAxisJoint()
Universal (Connector Section)
*PlanarJoint()
Slide-Plane + Revolute (Connector Section)
*Polybeam()
B31(Timoshenko Beam)
*RevJoint()
Joint + Revolute (Connector Section)
*SetFlexbodyComplaince()
Substructure Element
*SolverArray()
None
*SolverDiffEquation()
None
*SolverString()
None
*SolverVariables()
None
*TorsionSpring()
Connector Behavior
*TransJoint()
Slot + Align (Connector Section)
*UniversalJoint()
Joint + Universal (Connector Section)
MDL CommandSet Mapping
CommandSets do not apply to the Abaqus solver.
Templex Templates and Solvermode
Templex templates can be used to export syntax directly to the solver input deck,
including parametric substitution if required. For the Abaqus solver, the location
of statements within the solver input deck is important. The four keywords listed
below allow you to position the extra text. These keywords must be the first line of
the Templex template. The remaining text of the template is written according to the
position specified.
<@ABAQ/MODEL/HEAD>
Designates text that is written at the top of the model data.
<@ABAQ/MODEL/TAIL>
Indicates the end of the model data.
<@ABAQ/HISTO/HEAD>
Indicates the top of the history data.
<@ABAQ/HISTO/TAIL>
Indicates the end of the history data.
<@ABAQ/HISTO/STEP/HEAD>
Indicates that data will be written at the start of the first step.
<@ABAQ/HISTO/STEP/TAIL>
Indicates that data will be written at the end of the first step.
One MDL model can be used to export to more than one solver. In this case, create the
instance of the Templex template using the solvermode reserved keyword. This can be
done in two ways.
Results in the entire template 1 being used when Abaqus is
selected from the Solvers menu. When another solver is
selected, template 2 is used. When a template is used, it means that it is displayed
in the interface on the Templates panel and is acted upon
when saving the solver input deck.
To use the keyword, put the required string in the first line of the template. For
example, an MDL model
containing:
*DefineTemplate(........)
<@ABAQ/MODEL/HEAD>
text for abaqus
*EndDefine()
Results in "text for abaqus" being exported to the input deck when you select Abaqus
as the solver. The same applies for the portion of template that is displayed in the
user interface.
Template Types
A Templex template can have several destinations as well as a
unique default behavior.
A USER template does not get exported into any solver file but
can be useful for getting parametrically based text into another
file (by using the Templex Open and Close commands) or for text
targeted for the GUI only.
A SOLVER_INPUT template results in the template text being
exported to the .inp file for Abaqus.
The following templates do not apply to the Abaqus solver:
SOLVER_PARAM
GRAPHICS
ADAMS
ACF
CommandSets
CommandSets do not apply to the Abaqus solver.
Function Expressions
MotionView supports function expressions for many of its entities. These expressions
can be a function of time and state variables. You can create function expressions
that are exported directly as part of a corresponding solver entity.
The solver neutrality is somewhat limited because the solver needs to handle the
syntax that MotionView exports. For the Abaqus solver, supported expressions and
curves must be a function of time. Expressions that are a function of an axial
distance between two points are also supported. MotionView converts these to an XY
curve before writing to the input deck.
Flexbodies/Substructures
Pre-processing
MotionView allows you to represent an MDL body as an Abaqus
substructure. Before implementing the flexbody into an MDL model, you
have to create an Abaqus substructure for each component that you plan
on representing as a flexbody. (See the Abaqus help for this process).
In addition, you should export an .h3d file of this
same component from HyperMesh which will later be used for graphics
within MotionView pre-processing. The base name
(basename.ext) of the .h3d
file must match that of the substructure files for each component.
To utilize an Abaqus substructure within MotionView, simply toggle a
body to Flexbody in the
Properties tab. Identify the
.inp and .sup file for the
substructure and use the Nodes button to connect
the flexbody to the MDL model. You can choose to align the MDL point to
the exact location of the Abaqus connection node or you can enter a
tolerance that will be exported to the final Abaqus input deck.
Post-processing
To obtain an animation of the entire model, overlay the animations based
on the .odb files corresponding to each
sub-structure. Overlay one animation consisting of MODEL =
.mdl and RESULTS = .mrf,
where .mrf comes from converting an Abaqus
.fil file using Tools > Custom Wizard > Abaqus Fil to Altair Formats.
Note: It is recommended that new bodies are not
introduced through Templex templates as doing so can break the
mapping required for successful animation.
User Subroutines
User subroutines do not apply to Abaqus. Entities with a reference to user
subroutines are not used when exporting to the solver input deck.
Launch Solvers from MotionView
MotionView allows you to launch a process automatically after the solver input deck
is exported. For Abaqus, the installation contains default launch scripts located in
altair/utilities/mbd/launch_scripts. One or more of these
launch scripts can be registered through the preferences.mvw
file and then selected from the Run panel by using the
*RegisterSolverScript() preference statement.
Post-Processing
Animation - Transient with Rigid Bodies Only
Animate the results of an Abaqus run that was performed on a model
exported directly from MotionView:
From the Load Model panel in the
Animation window, select the MDL
model for the Model field.
Select the converted .mrf file for the
Result field.
The converted
.mrf file can be obtained by
running the translator fil2mrf from the Tools > Custom Wizards menu. MotionView does not support the
.odb format for rigid body
animations at this time.
This method automatically captures all graphics that were set up in the
pre-processed model. Animation depends on mapping, which holds as long
as no extra bodies were added in Templex templates, or edited manually
from the .inp file.
Plotting
To plot results from an Abaqus run, you can use the
fil2mrf translator to create an Altair binary
format (.abf) file. This file can be loaded
directly into the Plot window. The
.abf file contains the translational and
rotational displacements of all bodies. Any output requests for
displacement, velocity and acceleration are written out to the Abaqus
ODB file. Output requests of other kinds are not supported.
Define Stiffness and Damping Characteristics for Springs and Bushing
Elements
MotionView allows you to define stiffness and damping characteristics for coil and
torsion springs and bushing elements by:
Constant
Curve
Expression
The Abaqus solver does not support expressions. If you use the Abaqus solver, you can
only define stiffness and damping characteristics by a constant or curve.
If you define stiffness and damping characteristics by a constant, your model will
run correctly using the ADAMS or Abaqus solver.
If you define stiffness and damping characteristics by curve, use the following
conventions to obtain a model that will run correctly using the ADAMS or Abaqus solver.
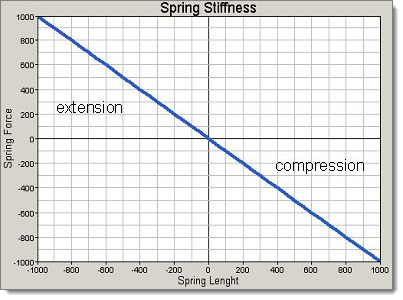
Spring Damper - Coil Spring- Stiffness
Verify that the independent variable does not contain a minus sign, "-",
in the expression. Figure 1. Set the characteristic curve with same trend as the curve
below:Figure 2.
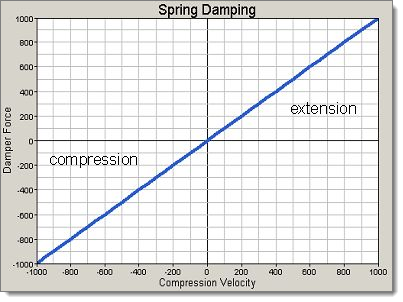
Spring Damper - Coil Spring - Damping
Verify that the independent variable does not contain a minus sign, "-",
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{sd_.VR}`, instead of
`{sd_.VR}`, as required for a solver independent
model.Figure 3. Set the characteristic curve with same trend as the curve
below:Figure 4.
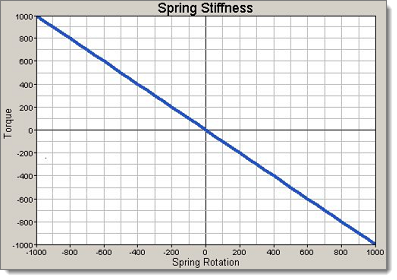
Spring Damper - Torsion Spring - Stiffne
Verify that the independent variable does not contain a minus sign, "-",
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{sd_.AZ}`, instead of
`{sd_.AZ}`, as required for a solver independent
model.Figure 5. Set the characteristic curve with same trend as the curve
below:Figure 6.
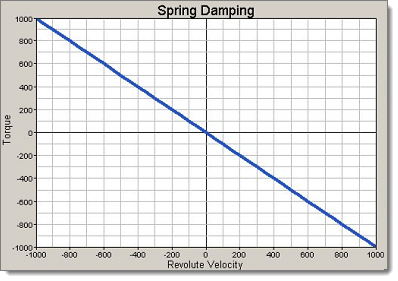
Spring Damper - Torsion Spring - Damping
Verify that the independent variable does not contained a minus sign, -,
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{sd_.WZ}`, instead of
`{sd_.WZ}`, as required for a solver independent
model.Figure 7. Set the characteristic curve with same trend as the curve
below:Figure 8.
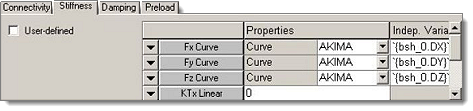
Bushing Elements - Translational Characteristics - Stiffness
Verify that the independent variable does not contain a minus sign, "-",
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{bsh_.DX}`, instead of
`{bsh _.DX}`, as required for a solver
independent model.
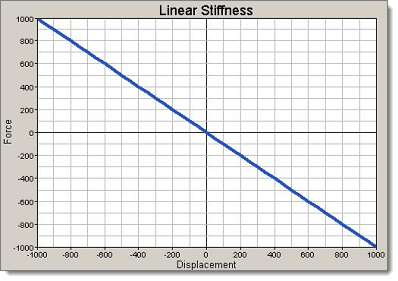
This applies to the Y and Z direction as well.Figure 9. Set the characteristic curve with same trend as the curve
below:Figure 10.
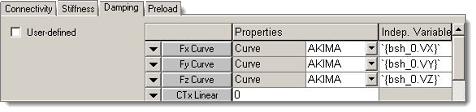
Bushing Elements - Translational Characteristics - Damping
Verify that the independent variable does not contain a minus sign, "-",
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{bsh_.VX}`, instead of
`{bsh_.VX}`, as required for a solver independent
model.
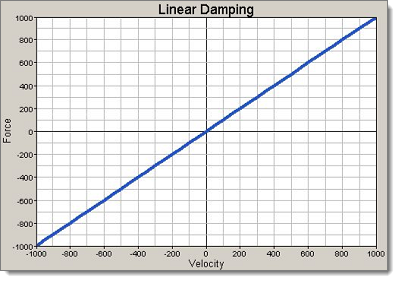
This applies to the Y and Z direction as well.Figure 11. Set the characteristic curve with same trend as the curve
below:Figure 12.
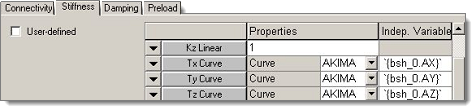
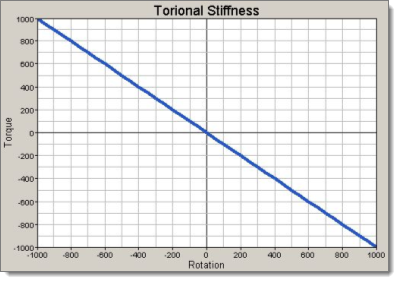
Bushing Elements - Rotational Characteristics - Stiffness
Verify that the independent variable does not contain a minus sign, "-",
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{bsh_.AX}`, instead of
`{bsh_.AX}`, as required for a solver independent
model.
This applies to the Y and Z direction as well.Figure 13. Set the characteristic curve with same trend as the curve
below:Figure 14.
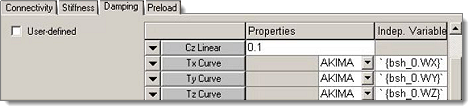
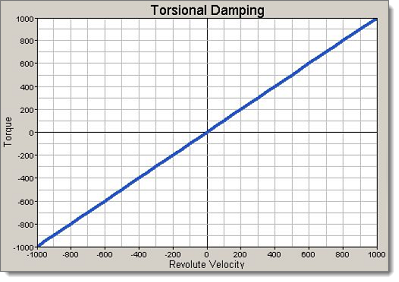
Bushing Elements - Rotational Characteristics - Damping
Verify that the independent variable does not contain a minus sign, "-",
in the expression. By default, MotionView writes the independent
variable with a minus sign, `-{bsh_.WX}`, instead of
`{bsh_.WX}`, as required for a solver independent
model.
This applies to the Y and Z direction as well.Figure 15. Set the characteristic curve with same trend as the curve
below:Figure 16.