MV-2035:MotionSolveによる弾性体ADM/ACFの解析
本チュートリアルでは、弾性体を含むADM/ACFモデルのMotionSolveによる解析、HyperViewでのAdd Objectパネルの使用、およびMotionSolveからのかと解析結果の確認を行う方法を学びます。
理論
ユーザーは、ADAMSデータセット言語ファイル(ADMおよびACF)を直接MotionSolveにサブミットすることができ、手動による変換を回避できます。ADAMSモデルはまず自動的にMotionSolve XMLフォーマットに変換され、その後、解析されます。ADAMSモデルがMNFおよびMTXファイルで表現される弾性体を有する場合、H3D弾性体ファイルの生成にはMotionViewからのFlexprepユーティリティが用いられます(MNFファイルを使用)。このH3D弾性体ファイルはMotionSolveでADAMS MNFおよびMTXファイルと同等に機能します。H3D弾性体ファイルには、質量、慣性プロパティ、および、荷重の適用時にボディを変形可能とする弾性プロパティが含まれます。変形は、空間的モードおよび時間依存の座標値のセットを使って定義されます。
プロセス
本チュートリアルでは、ADAMSの単気筒エンジンモデル(ADMおよびACF)が用意されています。モデルの応答の精度を高めるために、コネクティングロッドが弾性体としてモデル化されています(MNFおよびMTX)。ここでは、この単気筒エンジンモデルのMotionSolveによる過渡解析を行います。
ACFファイルを、弾性体H3Dファイルを生成する引数を含むように修正します。MotionSolveは内部的にOptiStructをコールし、そこでH3D弾性体ファイルが生成されます。ADMおよびACFは、MotionSolve XMLフォーマットに変換され、解析されます。MotionSolveが出力する結果のH3Dファイルは、アニメーション表示のためにHyperViewに読み込むことが可能です。HyperViewでは、可視化用として(ピストンとクランクの)外部グラフィックスを追加することができます。
MotionSolveは、ADAMSのステートメント、コマンド、関数、およびユーザーサブルーチンのほとんどをサポートしています。詳細については、MotionSolveユーザーズガイドをご参照ください。
ツール
- single_cylinder_engine.adm
- single_cylinder_engine.acf
- connecting_rod_flex_body.h3d
- Flexible_body.mnf
- Flexible_body.mtx
- piston.h3d
- crank.h3d注: 以下に、Adamsでの弾性体ファイルと、それに対応するMotionSolveファイルを示します:
オプション Adams MotionSolve 弾性体ファイル mnfおよびmtx H3D弾性体 ポスト処理アニメーション Graおよびres H3Dアニメーション Plot Req plt/abf
ACFファイルの修正
- 新しいMotionViewセッションを開始します。
- Select ApplicationをクリックしてTextViewを選択します。
-
ツールバーのOpen Sessionアイコン
 の横にある矢印をクリックし、Open document
の横にある矢印をクリックし、Open document  を選択します。作業ディレクトリ<working directory>にあるsingle_cylinder_engine.acfを選択します。
を選択します。作業ディレクトリ<working directory>にあるsingle_cylinder_engine.acfを選択します。
-
3行目に下記の文字列を追加します:
FLEX_BODY/1, H3D_FILE=connecting_rod_flex_body.h3dACFファイルはこのようになります:図 1. 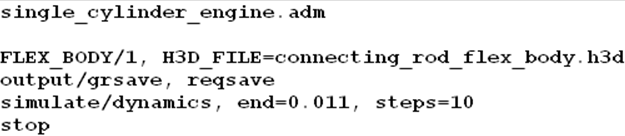
-
ツールバーからSave Documentアイコンをクリックし、ファイルをsingle_cylinder_engine.acfとして作業ディレクトリ<working directory>に保存します。
注: 本チュートリアルで使用されているconnecting_rod_flex_body.h3dファイルは、MotionViewでFlexPrepユーティリティを使って生成されています。ADAMS MNFファイルのMotionView H3D弾性体への変換の詳細については、MotionViewユーザーズガイドをご参照ください。
MotionSolveでのACFファイルの実行
-
をクリックします。
図 2. 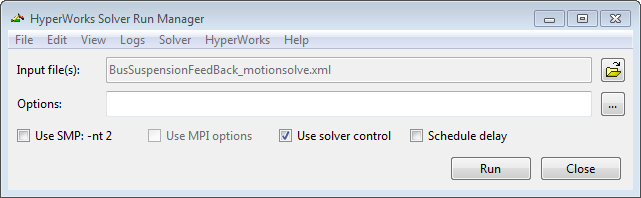
- Input fileでBrowseをクリックし、ファイルタイプのメニューからAll files (*.*)を選択します。作業ディレクトリ<Working directory>から入力ファイルsingle_cylinder_engine.acfを選択します。
-
Runをクリックします。
MotionSolveはADAMSモデル(ADM、ACF)をMotionSolve XMLフォーマットに変換し、解析します。MotionSolveは内部からOptiStructを起動し、コネクティングロッド弾性体MNFおよびMTXファイルを弾性体H3Dファイルに変換します。MotionSolveは下記のファイルを出力します:
- 結果のH3Dファイル - single_cylinder_engine.h3d
- プロットファイル - single_cylinder_engine.abf and single_cylinder_engine.plt
- ログファイル - single_cylinder_engine.log
注: MotionSolveは完全にMotionViewに統合されています。また、MotionViewのツールバーにあるRunアイコン を使ってこの機能を実行することも可能です。MotionSolveは、コマンドプロンプトからも実行できます。DOSコマンドウィンドウを開き、コマンドプロンプトで次のように入力します:[install_path]\hwsolvers\scripts\motionsolve.bat input_filename.[fem,acf,xml]
を使ってこの機能を実行することも可能です。MotionSolveは、コマンドプロンプトからも実行できます。DOSコマンドウィンドウを開き、コマンドプロンプトで次のように入力します:[install_path]\hwsolvers\scripts\motionsolve.bat input_filename.[fem,acf,xml]
追加のグラフィックスを加えてHyperViewで過渡解析結果を可視化
ADMファイルは外部グラフィックス情報を含まないため、MotionSolveからの結果にもこの種の情報は含まれません。HyperViewで結果の可視化に使用可能なparasolidファイルをADAMSからエクスポートすることができます。このステップでは、より良い可視化のために、ピストンとクランクの外部グラフィックスを追加します。
- 新しいHyperViewセッションを開始します。
-
Load modelファイルブラウザを使って、作業ディレクトリ<working directory>からsingle_cylinder_engine.h3dを選択します。
Load results欄も自動的にsingle_cylinder_engine.h3dファイルに更新されます。
-
Applyをクリックします。
モデルがウィンドウ内に表示されます。
-
Add Objectパネル
 でAdd object from:ブラウザを使って、piston.h3dファイルを選択します。Add Objectアイコンがツールバー上に見当たらない場合、を選択します。
でAdd object from:ブラウザを使って、piston.h3dファイルを選択します。Add Objectアイコンがツールバー上に見当たらない場合、を選択します。
- Select objectにAllを選択し、全てのオブジェクトをリストに追加します。
-
拡張ボタン
 を使って、選択したオブジェクトを移動させるコンポーネントにPistonを選択します。
を使って、選択したオブジェクトを移動させるコンポーネントにPistonを選択します。
- Reference systemに、Global座標系を選択します。
-
Addをクリックします。
モデルにピストンのグラフィックが追加されます。
- 手順5.から8.までを繰り返し、クランクオブジェクトをモデルに追加します。 注: Add Object from:ブラウザでcrank.h3dファイルを選択し、拡張ボタンを使ってそれをCrankに付加します。
-
ツールバー内のContour
 をクリックします。Result typeドロップダウンメニューから、コンター計算に使用されるべきデータタイプを選択します。
をクリックします。Result typeドロップダウンメニューから、コンター計算に使用されるべきデータタイプを選択します。
-
Result typeの下の2つ目のドロップダウンメニューからデータ成分を選択します。
注: 絶対値(Mag)を選択した場合、結果の座標系は使用不可能となります。これは、絶対値はどの座標系についても同じであるためです。
-
Applyをクリックします。
コンターが表示されます。
-
Start Animation
 をクリックしてモデルをアニメーション表示します。
をクリックしてモデルをアニメーション表示します。
-
処理を停止する場合は、Stop Animation
 をクリックします。
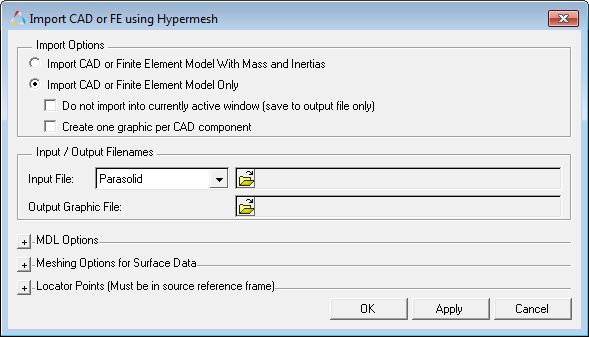
注: Add Object fromブラウザで、ADAMSからwavefrontファイル(*.obj)を直接選択し、グラフィックスを追加することが可能です。一方、ADAMSからのParasolidファイル(*.x_t)がある場合は、MotionViewのToolsメニューオプションImport CAD or FEを使ってH3Dファイルを生成します。このファイルを使って、グラフィックスを追加することができます。
をクリックします。
注: Add Object fromブラウザで、ADAMSからwavefrontファイル(*.obj)を直接選択し、グラフィックスを追加することが可能です。一方、ADAMSからのParasolidファイル(*.x_t)がある場合は、MotionViewのToolsメニューオプションImport CAD or FEを使ってH3Dファイルを生成します。このファイルを使って、グラフィックスを追加することができます。図 3.