MV-1026:曲線-曲線(CVCV)高次ペア拘束の構築
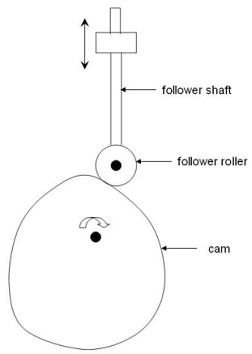
本チュートリアルでは、CVCV(曲線-曲線)ジョイントをモデル化する方法について学習します。
ポイントの作成
このステップでは、カム-フォロワーモデルにポイントを作成します。
- 新しいMotionViewセッションを開始します。
-
以下のいずれかの方法で、Add Point or PointPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Point)アイコンを右クリックします。
(Point)アイコンを右クリックします。
- LabelにPivotPointと入力します。デフォルトの識別子を受諾します。
- OKをクリックします。
- Propertiesタブをクリックし、X、Y、Z座標値を0.0と指定します。
-
表 1に指定したポイントについて、手順2から4までを繰り返します。
表 1. Point X Y Z FollowerShaftCM 0.0 67.5 0.0 FollowerTransJoint 0.0 85.0 0.0 FollowerRevJoint 0.0 30.0 0.0 CamCM 0.0 -14.1604 0.0
ボディの作成
このステップでは、カム-フォロワーモデルにボディを作成します。
-
以下のいずれかの方法で、Add Body or BodyPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Body)アイコンを右クリックします。
(Body)アイコンを右クリックします。
-
ダイアログで、Cam、FollowerShaftおよびFollowerRollerボディを追加します。
-
各ボディのプロパティパネルで、
- Get Properties from associated Graphic(s) チェックボックスをオフにします。
- 表 2に記載されている情報を指定します。
表 2. Body Mass Ixx Iyy Izz Ixy Iyz Izx Cam 0.1724 59.339 62.6192 121.240 0.0 0.0 0.0 FollowerShaft 0.0072 3.4270 0.0144 3.4270 0.0 0.0 0.0 FollowerRoller 0.0030 0.0251 0.0251 0.0375 0.0 0.0 0.0 -
Camボディについて、CM Coordinateタブの設定を指定します。
- Use center of mass coordinate systemボックスをチェックします。
-
 をダブルクリックします。
をダブルクリックします。
- Select a Pointダイアログで、CamCMを選択します。
- OKをクリックします。
- 軸の方向のプロパティについては、デフォルトの設定を受諾します。
-
FollowerShaftボディについて、CM Coordinateタブの設定を指定します。
- Use CM Coordsysボックスをチェックします。
-
をダブルクリックします。
- Select a Pointダイアログで、FollowerShaftCMを選択します。
- OKをクリックします。
- 軸の方向のプロパティについては、デフォルトの設定を受諾します。
-
FollowerRollerボディについて、CM Coordinateタブの設定を指定します。
- Use CM Coordsysボックスをチェックします。
-
をダブルクリックします。
- Select a Pointダイアログで、FollowerRevJointを選択します。
- OKをクリックします。
- 軸の方向のプロパティについては、デフォルトの設定を受諾します。
ジョイントの作成
このステップでは、カム-フォロワーモデルにジョイントを作成します。
-
以下のいずれかの方法で、Add Joint or JointPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Constraintsツールバーで、
 (Joints)アイコンを右クリックします。
(Joints)アイコンを右クリックします。
-
CamPivotジョイントを作成します。
- Add Joint or JointPairで、LabelにCamPivotと入力します。
- TypeにRevolute Jointを選択します。
- OKをクリックします。
-
Connectivityタブで
 をダブルクリックし、Camとします。
をダブルクリックし、Camとします。
-
 をGround Bodyとし、OKをクリックします。
をGround Bodyとし、OKをクリックします。
-
Connectivityタブでをダブルクリックし、PivotPointとします。
-
Alignment Axisを
 に変更します。VectorをGlobal
Zにします。
に変更します。VectorをGlobal
Zにします。
-
FollowerTransJointを作成します。
- Add Joint or JointPairで、LabelにFollowerTransJointと入力します。
- TypeにTranslational Jointを選択します。
- OKをクリックします。
-
Connectivityタブでをダブルクリックし、FollowerShaftとします。
-
をGround Bodyとし、OKをクリックします。
-
Connectivityタブでをダブルクリックし、FollowerTransJointとします。
-
Alignment Axisをに変更します。VectorをGlobal
Yにします。
-
FollowerRollerJointを作成します。
- Add Joint or JointPairで、LabelにFollowerRollerJointと入力します。
- TypeにRevolute Jointを選択します。
- OKをクリックします。
-
Connectivityタブでをダブルクリックし、FollowerRollerとします。
-
をFollowerShaftとし、OKをクリックします。
-
Connectivityタブでをダブルクリックし、FollowerRevJointとします。
-
Alignment Axisをに変更します。VectorをGlobal
Zにします。
マーカーの作成
このステップでは、カム-フォロワーモデルにマーカーを作成します。
-
以下のいずれかの方法で、Add Marker or MarkerPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Marker)アイコンを右クリックします。
(Marker)アイコンを右クリックします。
-
CamMarkerを作成します。
- Add Marker or MarkerPairダイアログで、LabelにCamMarkerと入力します。
- OKをクリックします。
-
Propertiesタブで
 をダブルクリックしてCamとし、OKをクリックします。
をダブルクリックしてCamとし、OKをクリックします。
-
Propertiesタブでをダブルクリックし、PivotPointとします。
- OKをクリックします。軸の方向については、デフォルトの設定を受諾します。
-
FollowerMarkerを作成します。
- Add Marker or MarkerPairダイアログで、LabelにFollowerMarkerと入力します。
- OKをクリックします。
-
PropertiesタブでをダブルクリックしてFollowerRollerとし、OKをクリックします。
-
Propertiesタブでをダブルクリックし、FollowerRevJointとします。
- OKをクリックします。軸の方向については、デフォルトの設定を受諾します。
グラフィックスの作成
このステップでは、カム-フォロワーモデルにボディとジョイントのグラフィックスを作成します。
-
以下のいずれかの方法で、Add Graphics or GraphicPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
- ダイアログで、LabelにCamと入力します。
-
ドロップダウンメニューからFileをクリックします。
図 2. 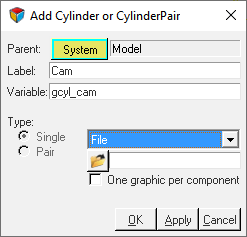
-
 (File Browser)アイコンをクリックし、モデルフォルダーからCamProfile.h3dを開きます。
(File Browser)アイコンをクリックし、モデルフォルダーからCamProfile.h3dを開きます。
- OKをクリックします。
-
Connectivityタブでをダブルクリックし、グラフィックスをCamボディとします。
- 手順1を繰り返し、もう一つのグラフィックスを作成します。LabelにFollowerShaftと入力します。
- ドロップダウンメニューからCylinderを選択し、OKをクリックします。
-
Connectivityタブでをダブルクリックし、グラフィックスをFollowerShaftボディとします。
-
をダブルクリックし、FollowerShaftCMを選択します。続いて、OKをクリックします。
-
Alignment Axisをに変更します。VectorをGlobal Yにします。
-
Propertiesタブで、表 3にリストされている値を指定します。
表 3. Property 値 Length 75 Offset -37.5 Radius 1 2.000 Radius 2 2.000 - CapのプロパティにCap Both Endsを選択します。
-
手順1を繰り返し、もう一つのグラフィックスを作成します。表 4および表 5に与えられているスペックを使用します。
表 4. Name Type Direction( )FollowerRoller Cylinder FollowerRoller FollowerRevJoint Global Z 表 5. Property 値 Length 5.0 Offset -2.5 Radius 1 5.000 Radius 2 5.000 - CapのプロパティにCap Both Endsを選択します。
-
表 6と表 7にあるスペックを用いて、CamPivotGraphicOneおよびCamPivotGraphicTwoを作成します。
表 6. Name Type Direction( )CamPivotGraphicOne Cylinder Ground Body PivotPoint Global Z CamPivotGraphicTwo Cylinder Cam PivotPoint Global Z 表 7. Name プロパティ 値 CamPivotGraphicOne Length 7.5 Offset -3.75 Radius 1 4.000 Radius 2 4.000 CamPivotGraphicTwo Length 7.6 Offset -3.8 Radius 1 2.000 Radius 2 2.000 -
RollerPivotGraphicOneとRollerPivotGraphicTwoを作成します。
- FollowShaft上にPut RollerPivotGraphicOneを置きます。Propertiesで、長さ7.5、半径2と指定します。
- FollowerRoller上にPut RollerPivotGraphicTwoを置きます。Propertiesで、長さ7.6、半径1と指定します。
-
FollowerTransJointGraphicを作成します。
-
Connectivityタブでをダブルクリックし、グラフィックスをGround Bodyとします。
-
をダブルクリックし、FollowerTransJointを選択します。続いて、OKをクリックします。
モデルは図 3ようになるはずです。図 3. 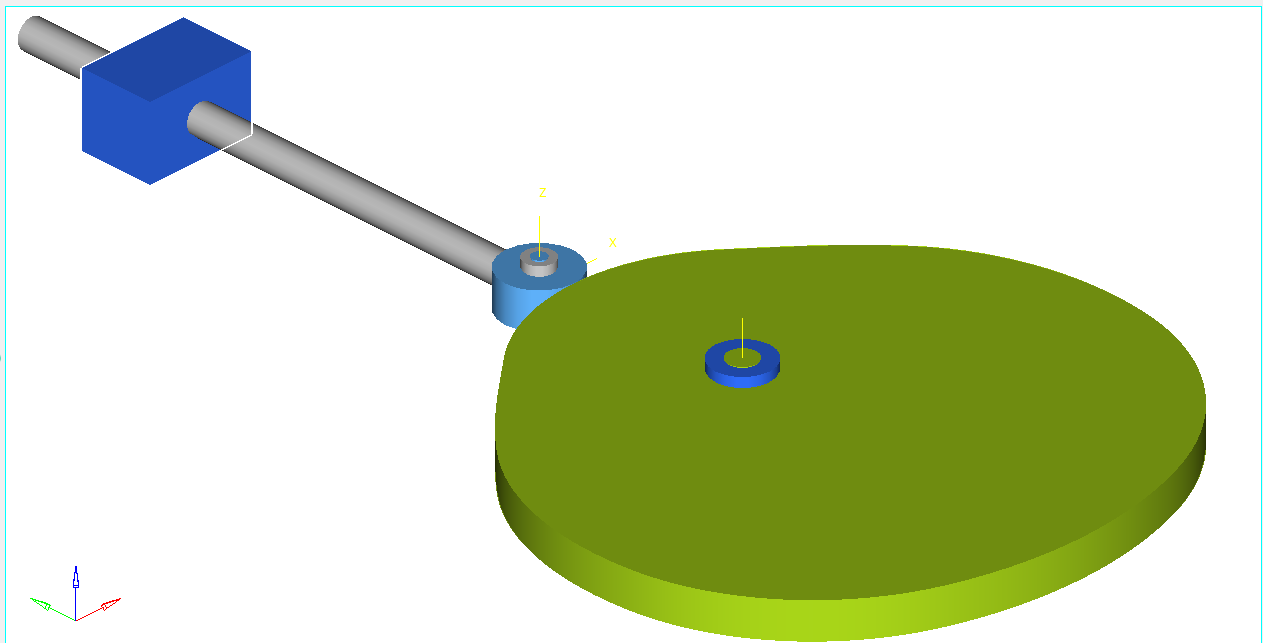
-
Connectivityタブで
カーブの作成
このステップでは、カムとローラーを定義するカーブを作成します。
-
以下のいずれかの方法で、Add Curveダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Curves)アイコンを右クリックします。
(Curves)アイコンを右クリックします。
- LabelにCamProfileと入力し、OKをクリックします。
- Propertiesタブで、1つ目のドロップダウンメニューを使って、カーブを2D Cartesianから3D Cartesianに変更します。
- ドロップダウンメニューをクリックし、カーブタイプをClosed curveに設定します。
- xラジオボタンをクリックします。
-
 をクリックし、CamProfile.csvを開きます。
をクリックし、CamProfile.csvを開きます。
-
図 4に示されているカーブのプロパティを選択します。
図 4. 
-
yラジオボタンをクリックします。ComponentをColumn 2に変更します。
図 5. 
-
zラジオボタンをクリックします。ComponentをColumn 3に変更します。
図 6. 
- ステップ1を繰り返します。ダイアログで、LabelにFollowerRollerProfileと入力します。
- OKをクリックします。
- Propertiesタブで、1つ目のドロップダウンメニューを使って、カーブを2D Cartesianから3D Cartesianに変更します。
- ドロップダウンメニューをクリックし、カーブタイプをClosed curveに設定します。
- xラジオボタンをクリックします。ドロップダウンメニューからMathをクリックします。
- Expression Builderで、5*sin(2*PI*(0:1:0.01))と入力します。
- yラジオボタンをクリックし、ドロップダウンメニューからMathを選択します。
- Expression Builderで、5*cos(2*PI*(0:1:0.01))と入力します。
- zラジオボタンをクリックし、ドロップダウンメニューからMathを選択します。
- Expression Builderで、0.0*(0:1:0.01)と入力します。
CVCVジョイントの作成
このステップでは、CVCV(曲線-曲線)ジョイントを作成します。
-
以下のいずれかの方法で、Add AdvJointダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Advanced Joint)アイコンを右クリックします。
(Advanced Joint)アイコンを右クリックします。
- ダイアログで、LabelにCVCVと入力します。
- ドロップダウンメニューからCurveToCurveJointを選択し、OKをクリックします。
-
Connectivityタブで各コレクター(
 、
、 、
、 、
、 )をダブルクリックし、図 7に示す結合を指定します。
)をダブルクリックし、図 7に示す結合を指定します。
図 7. 
カムの動きの指定
このステップでは、式を使ってカムの動きを指定します。
-
以下のいずれかの方法で、Add Motion or MotionPairダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Model-Referenceツールバーで、
 (Motion)アイコンを右クリックします。
(Motion)アイコンを右クリックします。
- ダイアログ内で、LabelにCamMotionと入力し、OKをクリックします。
-
Connectivityタブで、
 をダブルクリックします。CamPivotを選択し、OKをクリックします。
をダブルクリックします。CamPivotを選択し、OKをクリックします。
- Propertiesタブで、ドロップダウンメニューのExpressionにより動きを定義します。
-
Expression欄に、
`10*TIME`と入力します。図 8. 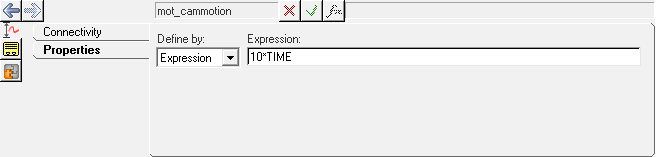
重力の指定
このステップでは、負のY方向に重力を指定します。
- Project Browserで、をクリックして拡張します。
-
Formsフォルダーで、Gravityをクリックします。パネル内で、以下の値を指定します。
- X Component = 0
- Y Component = -9810
- Z Component = 0
出力リクエストの指定
このステップでは、出力応答を指定します。
-
以下のいずれかの方法で、Add Outputダイアログを開きます:
- Project BrowserのModelを右クリックしてを選択します。
- Generalツールバーで、
 (Outputs)アイコンをクリックします。
(Outputs)アイコンをクリックします。
- ダイアログで、LabelにCVCV Reactionと入力し、OKをクリックします。
- Propertiesタブで、ドロップダウンメニューのExpressionにより動きを定義します。
-
F2欄内をクリックし、
 ボタンをアクティブにします。
ボタンをアクティブにします。
-
ボタンをクリックします。
-
Expression Builderで、式を'CVCV({aj_0.idstring},1,2,0)'と入力します。
図 9. 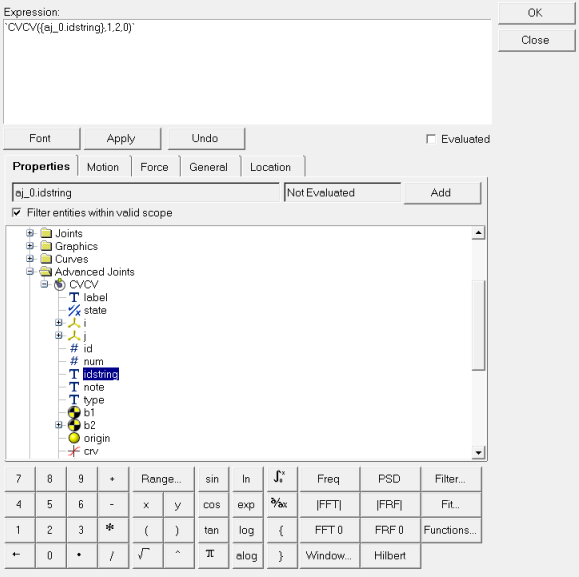
- OKをクリックします。
-
F3、F4、F6、F7、F8について、手順4から6までを繰り返します。式内の3番目のパラメータはそれぞれ3、4、6、7、8に変更します。
CVCV(id、jflag、ref_marker) 関数は、CVCVジョイントの反力を戻します。
- id CVCVジョイントのID
- jflag 0はIマーカー、1はJマーカーにかかる反力、
- comp 反力の成分
- ref_marker 参照マーカー(0はGlobal Frameを意味する)
モデルの実行
このステップでは、カム-フォロワーモデルを実行します。
-
ツールバーで、
 (Run)をクリックします。
(Run)をクリックします。
-
Runパネルで、図 10にリストされている値を指定します。
図 10. 
- Save and run current modelラジオボタンをクリックします。
-
(ブラウザアイコン)をクリックし、ソルバーファイルの名称を指定します。
- Saveをクリックします。
-
 (Check Model)ボタンをクリックし、モデルのエラーを確認します。
(Check Model)ボタンをクリックし、モデルのエラーを確認します。
- ソルバーを起動するために、Runボタンをクリックします。
-
ソルバーが完了したら、
 (Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
結果の表示
このステップでは、アニメーションの確認とフォロワーのY変位をプロットする方法について学習します。
-
ソルバーがジョブを完了すると、Animateボタンがアクティブになります。Animateをクリックします。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
この機構に含まれるフォロワーの変位のプロファイルにも注目する必要があります。そのためには、フォロワーの重心のY位置をプロットします。
-
Page Controlsツールバーで、
 >
>  をクリックします。下部右側のウィンドウをクリックしてアクティブにします。
をクリックします。下部右側のウィンドウをクリックしてアクティブにします。
-
アプリケーション選択ドロップダウンメニューを使って、クライアントをMotionView
 から HyperGraph 2D
から HyperGraph 2D  に切り替えます。
に切り替えます。
-
Curvesツールバーから
 (Build Plotsl)アイコンをクリックします。
(Build Plotsl)アイコンをクリックします。
-
(ブラウザアイコン)をクリックし、result.abfファイルを読み込みます。
-
Plotパネルを図 11に示すとおり設定します。
図 11. 
-
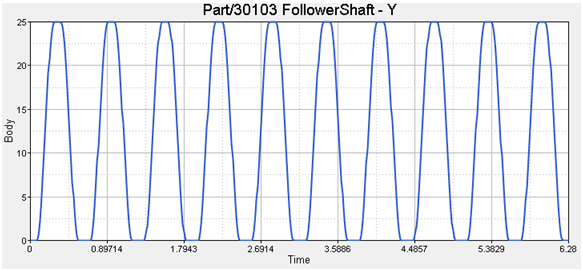
Applyをクリックします。これにより、フォロワーの重心のY位置をプロットします。
図 13. 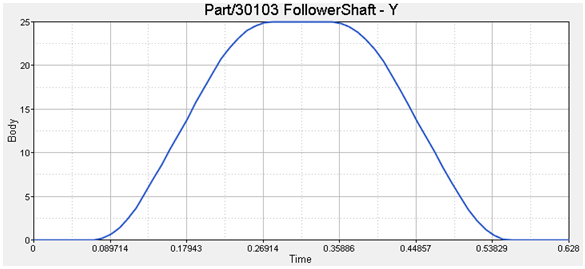
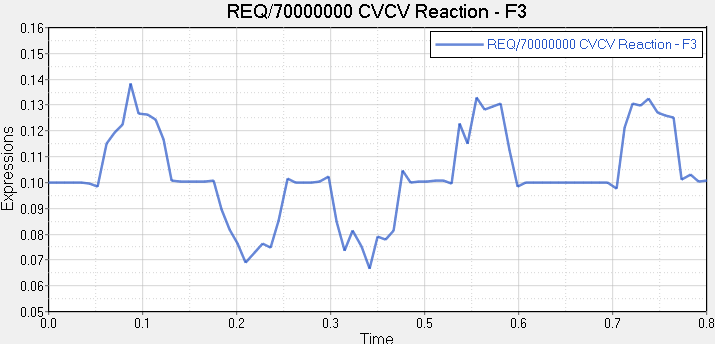
潜在的なリフトオフについてモデルをチェック
このステップでは、フォロワーローラーのCVCV反力のY輪郭をプロットすることによって、潜在的なリフトオフについてカムフォロワーの機構をチェックします。
-
 (Add Page)をクリックし、セッションに新規ページを追加します。
(Add Page)をクリックし、セッションに新規ページを追加します。
-
クライアントをHyperGraph 2D に切り替えます。
-
(Build Plots)をクリックします。
-
(ブラウザアイコン)をクリックし、result.abfファイルを読み込みます。
-
Plotパネルを図 14に示すとおり設定します。
図 14. 
-
OKをクリックし、フォロワーローラーのCVCV反力のYプロファイルをプロットします。
図 15. 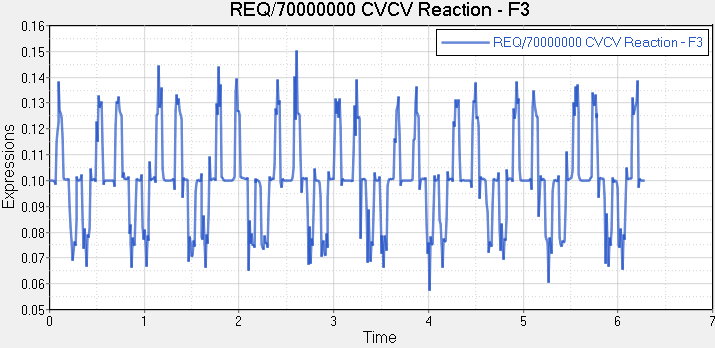
-
x軸をスケーリングして、プロファイルを1つのサイクルについて見てみます。
図 16.