
MV-5000:剛体のアニメーション(初級)
HyperViewでアニメーション結果をポスト処理するために用意されている機能の使用と、Entity Attributesを使ったシミュレーション結果の表示の制御を行う方法について学びます。
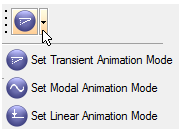
| Transient | トランジェントアニメーションは、解析コードによって計算された通り、モデルをタイムステップポジションで表示します。トランジェントアニメーションは、構造物またはマルチボディシステムの過渡応答のアニメーション表示に使用されます。 | |
| Linear | リニアアニメーションは、モデルの元のポジションに始まり、構造物またはマルチボディシステムの完全に変形されたポジションで終わる連続したアニメーションを作成、表示します。最初と最後のポジション間で、適切なフレーム数が線形的に補間されます。リニアアニメーションは、一般的には、結果が静解析からのものである場合に使用されます。 | |
| Modal | モーダルアニメーションは、構造物またはマルチボディシステムの元のポジションで開始、終了する連続したアニメーションを作成、表示します。変形しているフレームは、シヌソイド関数に基づき計算されます。モーダルアニメーションは、モードシェイプの表示に最も多く使用されます。 |
下の一覧は、アニメーション解析タイプ、モード設定、MotionSolveおよびADAMS結果のアニメーション表示に必要なモデルファイルと結果ファイルを示しています。
| マルチボディ解析タイプ | アニメーションモード設定 | モデル内のパート | モデルファイル | 結果ファイル |
|---|---|---|---|---|
| Transient/Static/Quasi-Static | 剛体または弾性体 | H3D | H3D | |
| Linear | 剛体または弾性体 | H3D | H3D |
| マルチボディ解析タイプ | アニメーションモード設定 | モデル内のパート | モデルファイル | 結果ファイル |
|---|---|---|---|---|
| Transient/Static/Quasi-Static | 剛体のみ | GRA | GRA | |
| Transient/Static/Quasi-Static | 1つまたは複数の弾性体 | FLX | FLX | |
| Linear | 剛体のみ | GRA | RES | |
| Linear | 1つまたは複数の弾性体 | FLX | FLX |
アニメーションファイルの可視化と制御
MotionSolveによって出力されたファイルをベースとした振子のアニメーションを可視化し制御します。
-
menu barでをクリックします。
注: 現在のデータを破棄したいかを確認するメッセージが表示されたら、Yesをクリックして次へ進みます。
-
アプリケーション選択ドロップダウンメニューから
 (HyperView)を選択します。
(HyperView)を選択します。
-
Standardツールバーから
 (Load Results)アイコンをクリックします。
(Load Results)アイコンをクリックします。
図 2. Load model and resultsパネル 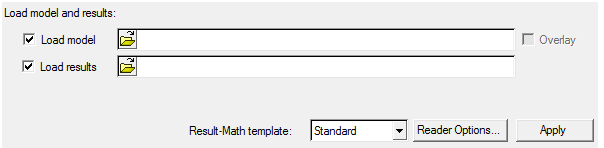
-
表示されたパネル内でLoad modelファイルブラウザ
 をクリックし、<作業ディレクトリ>にあるファイルsingle_pendulum.h3dを選択します。
Load result欄に同じパスと名称が自動的に記入されます。
をクリックし、<作業ディレクトリ>にあるファイルsingle_pendulum.h3dを選択します。
Load result欄に同じパスと名称が自動的に記入されます。 -
Applyをクリックします。
HyperViewはアニメーションファイルを読み込みます。
-
Standard Viewsツールバーで
 (XZ Left Plane View)をクリックし、モデルの左からのビューに変更します。
(XZ Left Plane View)をクリックし、モデルの左からのビューに変更します。
-
Animationツールバー の
 (Start/Pause Animation)ボタンをクリックし、アニメーション表示を開始します。
(Start/Pause Animation)ボタンをクリックし、アニメーション表示を開始します。
-
Standard Viewsツールバーの
 (Fit Model/Fit All Frames)を右クリックし、アニメーション全体をウィンドウいっぱいに表示させます。
(Fit Model/Fit All Frames)を右クリックし、アニメーション全体をウィンドウいっぱいに表示させます。
-
StandardAnimationツールバーから
 (Animation Controls)をクリックします。
表示されたこのパネルから、アニメーションのスピード、開始時間、終了時間などのパラメータが制御できます。
(Animation Controls)をクリックします。
表示されたこのパネルから、アニメーションのスピード、開始時間、終了時間などのパラメータが制御できます。図 3. Animation Controlsパネル 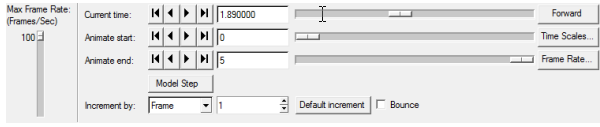
- 左側にある垂直のスライダーバーをドラッグすると、アニメーションスピードが高速から低速へ変更できます。
- Current time:は、すべてのタイムステップを示します。
- Animate startおよびAnimate endスライダーは、アニメーションを特定の範囲に限定するために設定できます。例えば、開始スライダーを0、停止スライダーを3.5に動かすと、アニメーションをこれらのタイムリミットに制限し、動きのサイクルの一部のみをカバーします。
-
Animationツールバー の
 (Start/Pause Animation)ボタンをクリックし、アニメーション表示を開始します。
(Start/Pause Animation)ボタンをクリックし、アニメーション表示を開始します。
エンティティのトレース
HyperViewを用いて、アニメーション中に動いているパートのパスをトレースします。
- Step アニメーションファイルの可視化と制御で読み込まれたアニメーションファイルsingle_pendulum.h3dを使用します。
-
振子の動きをトレースするには、
 (Tracing)ボタンをクリックします。
(Tracing)ボタンをクリックします。
図 4. Tracingパネル 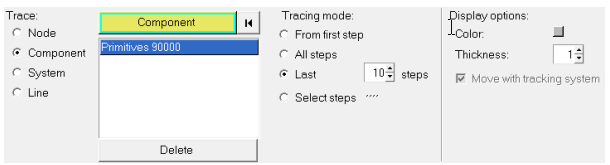
- Traceの下で、Componentラジオボタンを選択します。
- トレースを要するエンティティ / コンポーネントを、modeling windowでクリックしてピックします。
-
視点を
 (Iso)ビューに切り替えます。
(Iso)ビューに切り替えます。
- Tracing mode:の下でLastを選択し、stepsに10と指定します。
-
モデルをアニメーション表示します。
これで、アニメーション内の最後の10ステップが表示されます。
- トレーシングをオフにするには、Deleteボタンをクリックし、選択されたコンポーネントをトレーシングのリストから削除します。
- From First StepとAll Stepsオプションを試してみます。
- Display Optionsを使って、ラインの色と太さを変更します。
エンティティのトラッキング
アニメーションの1つのパートをトラッキングします。
-
Page Controls ツールバーの
 (Add Page)アイコンをクリックし、セッションにページを追加します。
(Add Page)アイコンをクリックし、セッションにページを追加します。
- <作業ディレクトリ>からアニメーションファイルfront_ride.h3dを選択します。
-
Resultsツールバーで、
 (Tracking)ボタンをクリックします。
(Tracking)ボタンをクリックします。
図 5. Trackingパネル 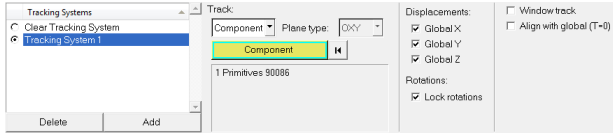
Trackingパネルでは、アニメーションウィンドウの中央にモデル内の任意のパートをトラッキングまたは固定し、その他のすべてのパートをその固定されたパートに相対して動かすことができます。
- Tracking Systemsの下でAddボタンをクリックし、トラッキングシステムをアニメーションに追加します。
- Trackプルダウンメニューで、Componentを選択します。続いて、現在読み込まれているモデルから1つのパートをクリックします。
- Displacementsおよび / またはRotationsを選択し、選択されたパートをトラッキングします。
-
Animationツールバー の(Start/Pause Animation)ボタンをクリックし、アニメーション表示を開始します。ボタンを再度クリックし、アニメーションを停止します。
エンティティ属性の編集
グラフィックエンティティの属性を編集します。
- Step エンティティのトラッキングで読み込まれたモデルfront_ride.h3dを使用します。
-
Visualizationツールバーで、
 (Entity Attributes)パネルボタンをクリックします。
(Entity Attributes)パネルボタンをクリックします。
図 6. Entity Attributesパネル 
-
パネル内で、Entityオプションメニューの右にある矢印をクリックして拡張します。
リストには、Components、Systems、Assembly HierarchyおよびSetsのエンティティタイプが含まれています。
- このリストからAssembly Hierarchyを選択し、モデル内のすべてのパートをその下のエンティティリストツリー内に表示させます。
-
モデルの色を変更します。
- Entity optionメニューからAssembly Hierarchyを選択します。
- エンティティリストツリーの横にあるAllボタンを選択します。
- Colorの下のパレットから1色を選びます。
-
モデルをワイヤーフレームに変更します。
- エンティティリストツリーの横にあるAllボタンを選択します。
-
 (Wire Frame)アイコンをクリックします。
(Wire Frame)アイコンをクリックします。
-
モデルを透明の影付きにします。
- エンティティリストツリーの横にあるAllボタンを選択します。
-
 (Shaded)アイコンをクリックします。
(Shaded)アイコンをクリックします。
-
 (Transparent)アイコンをクリックします。
(Transparent)アイコンをクリックします。
- エンティティの表示のオンオフを切り替えるには、On/Offボタンを使用します。
- エンティティIDの表示のオンオフを切り替えるには、ID:の横のOn/Offボタンを使用します。