
ローターダイナミクス
ローターダイナミクスは、回転するコンポーネントを含んだ構造の解析です。
そのような構造の動的な挙動は、回転するコンポーネントの種類と角速度、およびモデル内のコンポーネントの位置によって影響を受けます。OptiStructでは、モーダル法による周波数応答解析、複素固有値解析、静解析、直接法による線形過渡解析、および直接法による小変位非線形過渡解析のためのローターダイナミクスが利用可能です。
OptiStruct ローターダイナミクス解析のために、1Dと3Dの両方のローターをサポートしています。
利用目的

図 1では、構造内の回転するコンポーネントは、ギアーが取り付けられるシャフトです。ローターおよびそれらの角振動数の設計は、構造の動的応答に影響する可能性があります。どのような設計でも、ローター軸を中心として非対称な質量分布となりがちです。このような不平衡な質量は、それが大きくない場合でも、さまざまな要因によってローターの変形をもたらす可能性があります。これらの変形の大きさは、シャフトの回転速度が構造の固有振動数と等しい場合に拡大し(共振)、システムの壊滅的故障を引き起こす可能性があります。
インプリメンテーション
ローターダイナミクス機能は、OptiStructでRGYROサブケース情報エントリ(RGYRO=ID)を使用してアクティブ化されます。このRGYROエントリは、RGYROバルクデータエントリのID番号を参照します。関連するバルクデータエントリであるRSPINR、UNBALNC、ROTOR/ROTORGおよびRSPEEDは、ローターダイナミクスのためにモデル内で定義されます。パラメータPARAM、GYROAVG、PARAM、WR3およびPARAM,WR4も使用されます。
旋回
ローターは、特定の角速度でそれ自体の軸の周りを回転する構造です。ローターは、横力が作用すると、横方向に変形します。この変形は、作用する力の大きさ、ローターの材料特性、固定子の剛性、システム内での減衰など、さまざまな要因に依存します。ローターの回転により、変形したローターは軸の周囲で旋回します。
同期解析と非同期解析

前方旋回と後方旋回
旋回のタイプは、ローターの回転方向によって異なります。ローターの回転方向と旋回方向とが同一の場合は、前方旋回と呼ばれます。ローターの回転方向が旋回方向と逆の場合は、後方旋回と呼ばれます。複素固有値解析では、後方旋回および前方旋回を行う構造のモードを決定し、それらのモードを区別できます。
サポートされるソリューションシーケンス
OptiStructでは、以下の解析タイプでローターダイナミクス機能がサポートされています。
周波数応答解析
回転するコンポーネントを持つ構造が、指定された外部加振に対して反応する応答は、周波数応答解析ではローターダイナミクス機能を使用して決定できます。
非同期解析(RGYRO=ASYNC)
RGYROバルクデータエントリでASYNCが指定される場合、構造内のローターの回転速度はユーザー定義となります。加振周波数(FREQiバルクデータエントリ)は、RGYROエントリで定義される参照ローター回転速度とは関係ありません。
同期解析(RGYRO=SYNC)
RGYROバルクデータエントリでSYNCが指定される場合、参照ローター回転速度は加振周波数と等しく(同期)なります。参照ローター速度はRGYROバルクデータエントリによって入力されず、この解析ではFREQiエントリの値が使用されます。
複素固有値解析
回転するコンポーネントを持つ構造の固有値および危険速度は、複素固有値解析ではローターダイナミクス機能を使用して決定します。
非同期解析(RGYRO=ASYNC)
RGYROバルクデータエントリでASYNCが指定される場合、構造内のローターの回転速度はRSPEEDエントリによってユーザー定義され、キャンベル線図をプロットすることで危険速度を見つけることができます。また、算出された固有値は複素数であり、それらの実部を調べることで不安定なモードを見つけることができます。複素固有値の実部が正の場合、対応するシステムモードは不安定になります。
同期解析(RGYRO=SYNC)
周波数応答解析(ASYNC)
非同期解析は、RGYRO=ASYNCオプションを使用してアクティブ化されます。ローターダイナミクスでの周波数応答解析には、周波数に応じた変化する外部荷重、またはUNBALNCエントリによるローターの不平衡(または、ローターの不平衡の影響をシミュレーションする力)のどちらかとしての加振の定義が含まれます。OptiStructでの非同期周波数応答解析は、特定の一連の周波数での変化する外部荷重のために設計されています。OptiStructでは、以下の方程式によって外部荷重機能が実装されています。非同期周波数応答解析には、ローター回転速度を指定する必要があります。
回転するコンポーネントを持つシステムが、周波数領域内の外部荷重に対して反応する応答は、式 1に基づいて計算されます。
周波数応答解析(SYNC)
同期解析は、RGYRO=SYNCオプションを使用してアクティブ化されます。ローターダイナミクスでの周波数応答解析には、周波数に応じた変化する外部荷重、またはUNBALNCエントリによるローターの不平衡(または、ローターの不平衡の影響をシミュレーションする力)のどちらかとしての加振の定義が含まれます。OptiStructでの同期周波数応答解析は、ローターの不平衡があるシステムの応答を計算できるように設計されています。OptiStructでは、以下の方程式によってローターの不平衡機能が実装されています。ローター回転速度は、同期周波数応答解析のためにFREQiエントリから決定されます。
回転するコンポーネントを持つシステムが、周波数領域内で作用する力と見なされるローター不平衡に対して反応する応答は、式 2に基づいて計算されます。
WR3、WR4およびWRHを用いた周波数応答解析(ASYNC)
パラメータPARAM、WR3、PARAM,WR4、およびPARAM,WRHは、複数のローターを持つシステムでローター回転速度の周波数依存計算が行われないようにするために使用できます。円運動減衰の項にある周波数値は、式 3で示されているようにパラメータの値と置き換えられます。PARAM,GYROAVGは、周波数依存の探索の回避と、WR3、WR4、およびWRHの値の使用を可能にするには、-1に設定する必要があります。
WR3、WR4およびWRHを用いた周波数応答解析(SYNC)
パラメータPARAM、WR3、PARAM,WR4、およびPARAM,WRHは、複数のローターを持つシステムでローター回転速度の周波数依存計算が行われないようにするために使用できます。ローター回転速度は、参照ローター回転速度の線形関数として計算できます(以下で項の説明を参照)。円運動減衰の項にある参照ローター回転速度の値は、式 4のようなパラメータの値と置き換えられます。PARAM,GYROAVGは、周波数依存の探索の回避と、WR3、WR4、およびWRHの値の使用を可能にするには、-1に設定する必要があります。
WR3、WR4およびWRHを用いた複素固有値解析(ASYNC)
回転するコンポーネントを持つ構造の固有値および危険速度は、複素固有値解析ではローターダイナミクス機能を使用して決定します。非同期解析では、RSPEEDエントリを使用して指定された周波数のキャンベル線図をプロットすることで、危険速度も決定できます。式 5では、パラメータPARAM、WR3、PARAM、WR4、およびPARAM、WRHは、WR3、WR4、およびWRHの値として使用することができます。
WR3、WR4およびWRHを用いた複素固有値解析(SYNC)
旋回周波数は参照ローター回転速度と等しいため、同期複素固有値解析の実行にはローター回転速度のみが要求されます。この解析の結果として、危険速度のみが出力されます。式 6では、パラメータPARAM、WR3、PARAM、WR4、およびPARAM、WRHは、WR3、WR4、およびWRHの値として使用することができます。
静解析
静解析の場合、下記の運動量の項が、各ローター節点における荷重ベクトルに付加されます。
線形および小変位非線形直接法過渡解析
過渡ローターダイナミクスでは、ローター速度( )は時間依存です。変位の式(WR3、WR4、WRHを用いる)は:
- 参照ローター回転速度
- 参照ローター回転速度の関数としてのローター回転速度“ ”
- 加振周波数ごとに決定することや、参照ローター回転速度の線形関数として計算することができます:
- 構造質量
- 支持の粘性減衰
- ローターの粘性減衰
- ローターのハイブリッド粘性減衰
- ローター質量
- ローター剛性
- ローターの材料減衰
- ローターのハイブリッド材料減衰
- ローターの粘性減衰による円運動
- ローターのハイブリッド粘性減衰による円運動
- ローターの質量による円運動
- ローターの構造的な剛性による円運動
- ローターの材料減衰による円運動
- ローターのハイブリッド材料減衰による円運動
- 支持の剛性
- 支持の質量
- 支持の材料減衰
- 支持のハイブリッド粘性減衰
- 支持のハイブリッド材料減衰
- モデル内のローター数。
- 周波数の関数としての変位
- 参照ローターの回転速度の関数としての変位
- 周波数の関数としての外部加振
- 参照ローターの回転速度の関数としての不平衡荷重(DAREAまたはUNBALNCバルクデータエントリを使用)
- PARAM,Gを使用して定義された支持の構造減衰値
- PARAM,Gを使用して定義されたローターの構造減衰値
- 関連するRFORCEバルクデータエントリから取得された角速度ベクトル
、WR4およびWRHは、パラメータPARAM, WR3、PARAM, WR4およびPARAM, WRHを介して定義されます。これらはローター依存でもあり得て、RSPINRおよびRSPINTバルクデータエントリで指定されます。これらのパラメータによって、PARAM, GYROAVG, -1が指定されている際に等価“平均”加振周波数を指定することで、周波数依存のループを回避することができます。
円運動減衰の項の一般的な形式は次のとおりです:
- 標準の減衰マトリックス
- ローター座標系で次のように定義されるスキュー-対称回転マトリックス
- ローター座標系で次のように定義されるジャイロマトリックスです:
モデルのガイドライン
1次元ローターモデル
ROTORGエントリのCBEAM、CBAR、またはCBUSHなど、1次元要素を使用してモデル化されたローターシャフトのみを使用できます。CONM1またはCONM2エントリは、ローターの質量および慣性を定義するために使用する必要があります。節点は、CONM1またはCONM2を使用して質量および慣性を定義するために必要となります。1Dローターに属するすべての節点は、ROTORGエントリでリストされる必要があり、ROTORGエントリでリストされている節点のみが、ジャイロ項の計算に含まれます。ローカルのX、YまたはZ軸の周りの慣性のみがジャイロ力で役割を果たすため、CONM2エントリのIxxフィールドには、意味をなす値を含める必要があります。CONM1エントリが使用される場合、Mxy質量値は、ローカルのX、YまたはZ軸の周りの慣性モーメントが意味をなすよう指定される必要があります。
3Dローターモデル
ローターシャフトは、ROTORバルクデータエントリを使用して3Dでモデリングすることもできます。
- 0D要素:CONM1、CONM2
- 1D要素:CBEAM、CBAR
- 3D要素:CHEXA、CPENTA、CTETRA、CPYRA
分離したローターモデル
1Dと3Dのどちらのローターも、ローター部分が構造の残りの部分から分離されている必要があります。ローターを地面または弾性ベアリングに結合するために使用できるのは、剛体要素(RBEi)のみとなります。ローターと構造内の他のパートとの間に、RBEi以外の要素を使用する結合が存在する場合、エラーとなります。
固定された参照フレームでの対称ローター
OptiStructでのローターダイナミクス解析は、ローターが対称形状であるという前提に基づいて実行されます。そのため、ローターモデルは、回転軸に対して対称形状である必要があります。インプリメンテーションは、固定された参照フレームで定式化された運動方程式に基づきます。回転する参照フレームにおける非対称ローターは、OptiStructの将来のバージョンで実装される予定です。
ローター-軸のガイドライン
- これらの節点は、ユーザー定義の入力座標系を持つことができます。ローター軸は入力座標系に依存するため、この定義によりローター軸の方向が変化する場合があります。
- これらの節点は、ユーザー定義の出力座標系を持つこともできます。出力座標系は、ローター軸の方向に影響を与えません。

複数のローター
同期解析時に、参照ローターに関して計算が実行されます。参照ローターは、同期周波数応答解析では不平衡荷重の周波数で回転し、同期複素固有値解析ではシステムの旋回周波数で回転します。複数ローターシステムでの結果の解釈は、必ず参照ローターに関して行う必要があります。参照ローター以外のローターの挙動からの結果の推論は不正確であり、正しい結果が得られない可能性があります。参照ローター以外のローターの挙動を調べる場合、対象となるローターを参照ローターとして使用して、別の解析を実行する必要があります。
- 同軸
- ローターは同じ回転軸を共有します。
- 多軸
- ローターは異なる回転軸を持ちます。
キャンベル線図
回転する構造が共振速度に到達しないよう稼動速度を制限する必要がある場合は、回転する構造の危険速度を計算する必要があり、その後に設計パラメータを変更できます。
- 同期複素固有値解析複素固有値解析でのRGYRO=SYNCオプションは、回転する構造の正確な危険速度を決定するために使用できます。同期解析時に、ローター速度は構造の旋回周波数と等しくなります。これは定義によれば、その稼動時に回避する必要がある、構造の危険速度です。
図 4. 危険速度を計算するためのキャンベル線図 
- 非同期複素固有値解析複素固有値解析でのRGYRO=ASYNCオプションおよびRSPEEDバルクデータエントリは、構造の旋回周波数(後方旋回および前方旋回)を決定するために使用できます。一連のローターの回転速度に対応するこれらの旋回周波数を計算できます。また、ローターの回転速度の範囲に対応する前方旋回および後方旋回の周波数をプロットすることができます(図 4)。危険速度は、プロットに“Rotor Spin Rate = Whirl Frequencies”行を加えることによって計算できます。交差する点が危険速度です。注: 危険速度を得るためには、RSPEEDエントリで指定されたローター速度は十分に細かな粒度で入力する必要があります。指定されたローター速度が離れすぎている場合は、危険速度を得ることができなくなる可能性があります。
HyperGraph 2Dでのキャンベル線図
HyperGraph 2Dでキャンベル線図を作成する手順は次のとおりです:
-
HyperGraph 2Dで.outファイルからローター速度vs周波数のプロットが生成されます。X requestをMode 1に設定した例を下に示します。
キャンベル線図をプロットするためのHyperGraph 2Dの制御オプション例
- X Type
- Subcase: 1 Campbell Summary
- X Request
- Mode 1
- X Component
- Rotor Speed
- Y Type
- Subcase: 1 Campbell Summary
- Y Request
- 必要なすべてのモード
- Y Component
- Frequency
図 5. HyperGraph 2Dの制御オプション 
-
Plotブラウザから必要なすべての曲線が選択されます。右クリックし、Multiple Curves Math、Campbell
Diagramを選択します。
Campbell Diagramダイアログが開きます。
図 6. HyperGraph 2Dでのキャンベル線図のプロット 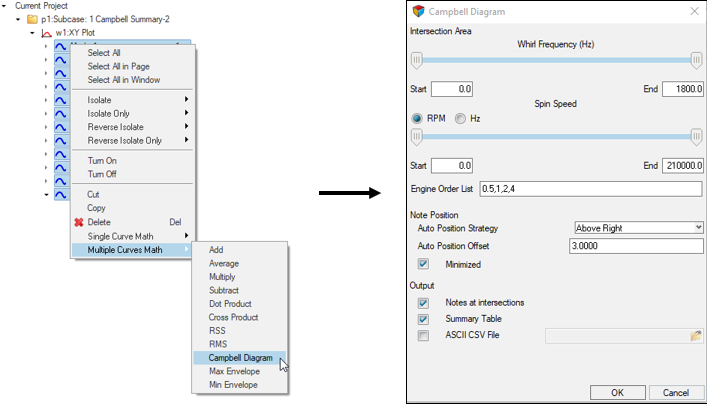
-
Campbell Diagramダイアログで、図 6のオプションを設定し、OKをクリックします。
図 7. HyperGraph 2Dでのキャンベル線図 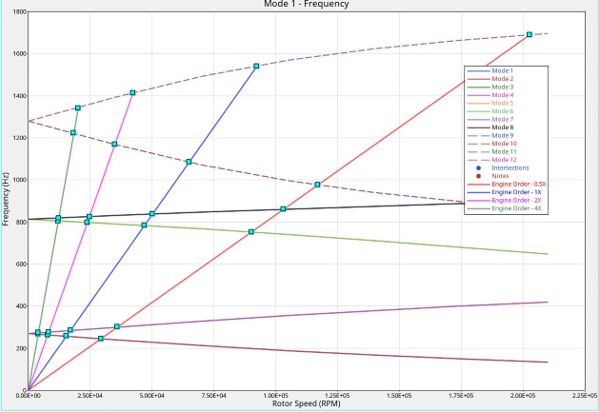
ロータースーパーエレメント
周波数応答および複素固有値ソリューションでのローターは、スーパーエレメントを使って置き換えることができます。
出力
Subcase: 1
Campbell Diagram Summary
Mode #: 1
-------------------------------------------------------------------------------
Step Rotor speed Eigenvalue Eigenvalue Frequency Damping Whirl
(RPM) (Re) (Im) (Hz)
-------------------------------------------------------------------------------
1 0.000E+00 -1.92148E-01 -3.81017E+02 6.064E+01 1.009E-03 LINEAR
2 2.000E+02 -1.92108E-01 -3.81011E+02 6.064E+01 1.008E-03 BACKWARD
3 4.000E+02 -1.91987E-01 3.80993E+02 6.064E+01 1.008E-03 BACKWARD
4 6.000E+02 -1.91788E-01 -3.80964E+02 6.063E+01 1.007E-03 BACKWARD
5 8.000E+02 -1.91513E-01 3.80924E+02 6.063E+01 1.006E-03 BACKWARD
6 1.000E+03 -1.91163E-01 3.80873E+02 6.062E+01 1.004E-03 BACKWARD
7 1.200E+03 -1.90742E-01 3.80810E+02 6.061E+01 1.002E-03 BACKWARD
Mode #: 2
-------------------------------------------------------------------------------
Step Rotor speed Eigenvalue Eigenvalue Frequency Damping Whirl
(RPM) (Re) (Im) (Hz)
-------------------------------------------------------------------------------
1 0.000E+00 -1.92148E-01 3.81017E+02 6.064E+01 1.009E-03 LINEAR
2 2.000E+02 -1.92108E-01 3.81011E+02 6.064E+01 1.008E-03 BACKWARD
3 4.000E+02 -1.91987E-01 -3.80993E+02 6.064E+01 1.008E-03 BACKWARD
4 6.000E+02 -1.91788E-01 3.80964E+02 6.063E+01 1.007E-03 BACKWARD
5 8.000E+02 -1.91513E-01 -3.80924E+02 6.063E+01 1.006E-03 BACKWARD
6 1.000E+03 -1.91163E-01 -3.80873E+02 6.062E+01 1.004E-03 BACKWARD
7 1.200E+03 -1.90742E-01 -3.80810E+02 6.061E+01 1.002E-03 BACKWARD- まれなケースとして、ジョブを複数のマシンで実行している場合は、特定のモデルで、ペアを構成しているモード間で固有値虚数部の符合が反転することがあります。この原因は、モードを順序付けする際の数値差です。
- ルートは共役複素数であるため、あるモードの特定のステップ(ローターの回転速度に相当)で符合が変化すると、それに続くモードの同じステップでは符号が反転します。