HM-4640:ダミーポジショナー
ここでは、ダミーの位置決めのためのデフォルト機能の違いについて学習します。
開始する前に、このチュートリアルで使用するファイルを作業ディレクトリにコピーします。
ここで使用されている運転席と環境には、National Crash Analysis Center (NCAC) ウェブサイトで公開されているLS-DYNA Toyota Yarisモデルを使います。
また、LS-DYNAダミーモデルは、NHTSAウェブサイトで公開されている、THOR-Mod Kit/Metric crash test dummy with SD3 shoulderを使用します。
LS-DYNAプロファイルの読み込み
このステップでは、HyperMeshでLS-DYNAプロファイルを読み込みます。
- HyperMeshを開始します。
- プロファイルをLsDynaに設定します。
モデルファイルの取得と表示
このステップではモデルファイルを開き、HyperMeshで表示します。
- メニューバーでをクリックします。
- ダイアログでdummy_positioner.hmファイルを選択します。
Hポイント位置へのダミーの配置
このステップでは、ダミーをシート上のHポイント位置に移動します。
-
Safety(安全解析)リボンから
Dummy(ダミー)ツールをクリックします。
図 2. 
-
DummyブラウザでTHOR_FEダミーエンティティをクリックし、エンティティエディターでグローバルな位置パラメータをアクティブにします。
図 3. 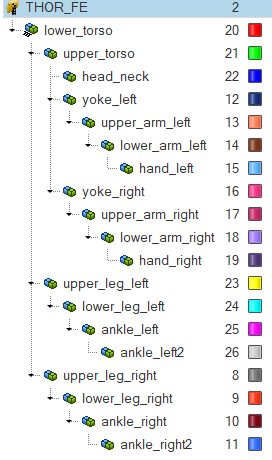
-
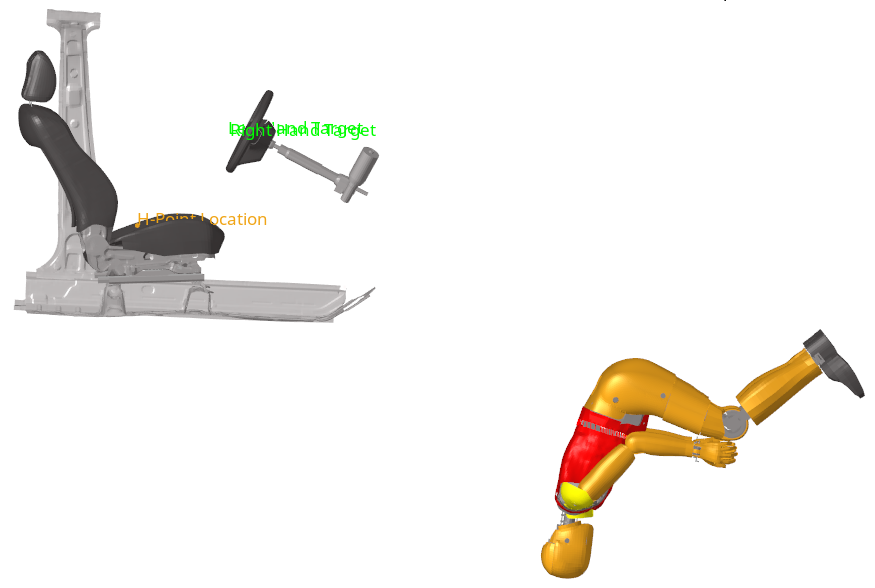
エンティティエディターのGlobal rotation attribute Rxに180と入力します。
ダミーが回転します。
-
モデリングウィンドウで図 4に示されているようにH-Point Locationというタグの付いた節点を選択します。
図 4. 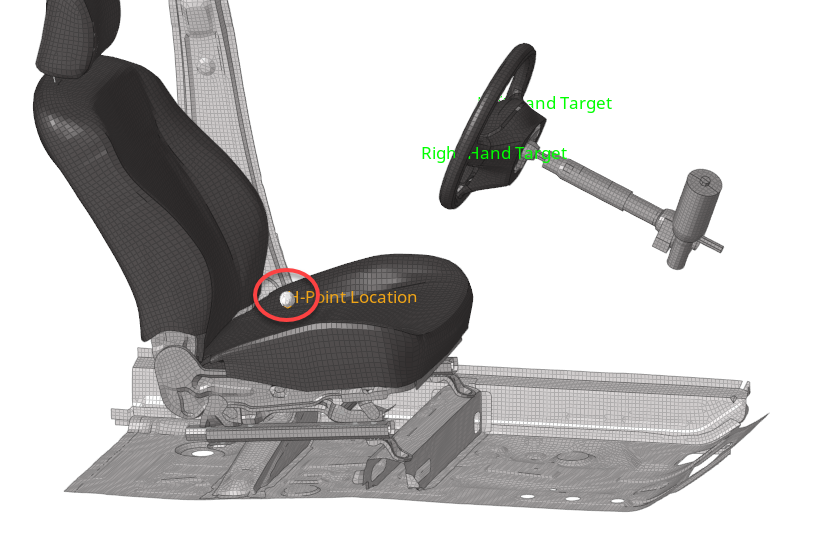
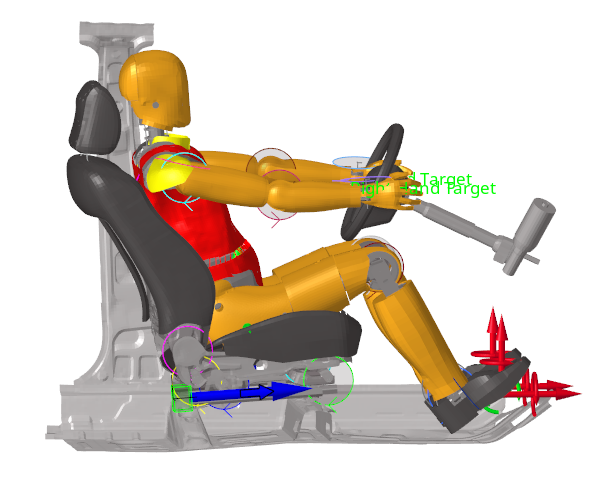
ダミーが選択したHポイントの位置に自動的に移動します。図 5. 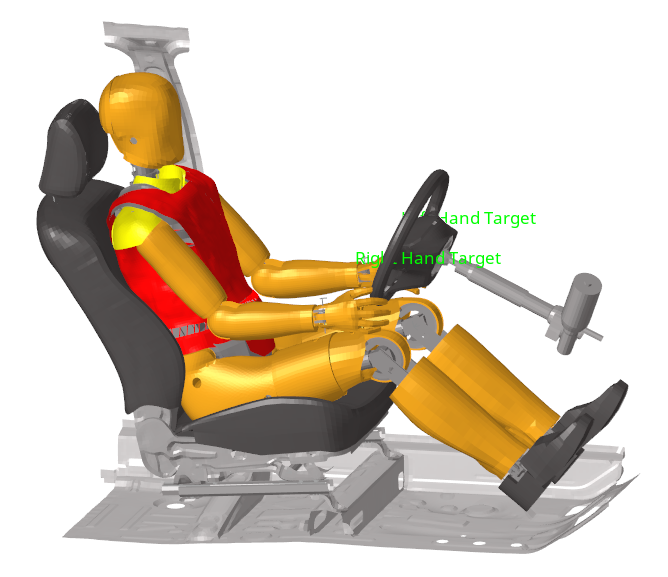
手足の手動配置
このステップでは、lower_leg_leftエンティティとlower_leg_right bodyエンティティを手動で配置します。
-
Dummyブラウザで、lower_leg_leftボディエンティティをクリックします。
図 6. 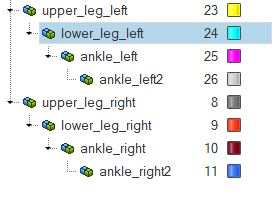
モデリングウィンドウにジョイントマニピュレータが表示され、エンティティエディターが開きます。図 7. 
-
次のいずれかを実行し、下肢を配置します:
- モデリングウィンドウで、マニピュレータ上の最も小さい青色の円弧を選択し、下肢を-70°の角度にインタラクティブに配置します。
- エンティティエディターで、Current angle欄に-70と入力します。
- Dummyブラウザで、lower_leg_rightボディエンティティをクリックします。
- 手順2を繰り返します。
手の自動配置
このステップでは、手を自動的に配置します。
- Dummyブラウザで、THOR_FEダミーエンティティを右クリックし、コンテキストメニューからMove Limbsを選択します。
- Multiple pairsをYesに設定します。
- Select pairs欄をクリックます。
-
左手を配置します。
-
モデリングウィンドウで図 8に示されているようにLeft Hand Targetというタグの付いた節点を選択します。
図 8. 
-
モデリングウィンドウで図 8に示されているようにLeft Hand Targetというタグの付いた節点を選択します。
-
右手を配置します。
-
Select multi nodesダイアログで、
 をクリックして2行目を追加し、右手のSource PointとTarget Pointを定義します。
をクリックして2行目を追加し、右手のSource PointとTarget Pointを定義します。
-
モデリングウィンドウで図 9に示されているようにRight Hand Targetというタグの付いた節点を選択します。
図 9. 
-
Select multi nodesダイアログで、
- Select multi nodesダイアログで、Closeをクリックします。
-
Select Bodiesをクリックします。
図 10. 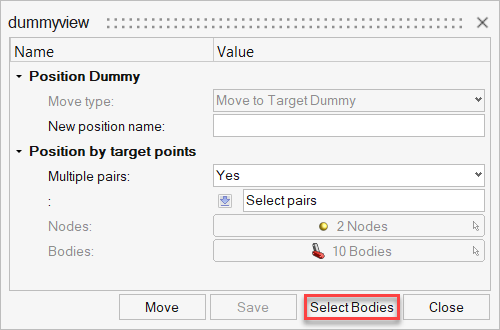
-
Dummy Bodies DOFダイアログで、ダミーの手足の自動配置で考慮するダミーボディとダミーDOFを有効 / 無効にします。
-
dummyviewダイアログでMoveをクリックし、手足の自動配置をアクティブにします。
図 11. 
ダミー位置の保存と取得
このステップでは、ダミー位置を保存し、取得します。
- Dummyブラウザで、THOR_FEダミーエンティティを右クリックし、コンテキストメニューからを選択します。
-
Update Position infoダイアログで、Name欄にFinal Positionと入力し、Closeをクリックします。
ダミーの実際の位置が保存され、将来参照する際に取得することができます。
-
ダミーの初期位置を取得するには、Dummyブラウザで、THOR_FEダミーエンティティを右クリックし、コンテキストメニューからを選択します。
ダミーが初期位置に自動的に移動します。
-
保存したダミー位置を取得するには、Dummyブラウザで、THOR_FEダミーエンティティを右クリックし、を選択します。
- PositionsダイアログでFinal Positionを選択し、Closeをクリックします。
ダミーのシートメカニズムへのリンク
このステップでは、ダミーをシートメカニズムにリンクします。
-
Safety(安全解析)リボンから
Mechanism(メカニズム)ツールをクリックします。
図 12. 
Mechanismブラウザが開きます。 -
MechanismブラウザでDriver_Seatメカニズムを展開し、定義されたさまざまなジョイントやボディを確認します。
図 13. 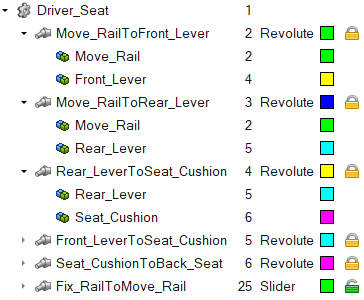
- Driver_Seatメカニズムエンティティを右クリックして、コンテキストメニューからLink To Dummyを選択します。
- DummiesダイアログでTHOR_FEを選択し、Nextをクリックします。
-
Mechanism Bodies [Parent Body]ダイアログでSeat_Cushionを選択し、Nextをクリックします。
このボディは、ダミーの動きを駆動する親ボディになります。Mechanism Bodies [Parent Body]ダイアログで、ダミーのHポイントを含むボディが自動的に選択され、マスターボディにリンクされたボディのDOFがTX、TY、TZとして自動的に設定されます。これで十分です。
-
Closeをクリックし、ダミーのシートメカニズムへのリンクを確定します。
この時点で、シートが動くとそれに応じてグローバルなダミーの動きが生じます。また、足などのようにその位置に留まる可能性のあるダミーのボディの一部を拘束することもできます。
-
ankle_left2ボディ上に制約を作成します。
- ankle_right2ボディと節点ID=581450に、同じ固定自由度で制約を作成します。
- Mechanismブラウザで、Fix_RailToMove_Railジョイントを右クリックし、コンテキストメニューからMoveを選択します。
-
エンティティエディターで、Current Distance欄に-50.0と入力します。
ダミーがシートと共にどのように動くのか、また足に定義された制約により、レッグや足の位置がどのように更新されるのかに注目してください。
図 14.