MotionView入門 - パート1
このチュートリアルは、マルチボディモデリングを初めて使用するユーザーが、MotionViewのインターフェースや、モデル構築、解析、結果のレビューのプロセスに慣れるのに役立ちます。
開始する前に、このチュートリアルで使用するファイルを作業ディレクトリにコピーします。
このチュートリアルでは、以下のことを行います:
- MotionViewの起動
- CAD形状のインポート
- モデルのセットアップ
- モデルの解析
- 結果の確認
MotionViewの起動
このステップでは、MotionViewを起動する方法を学習します。
-
Windowsの場合、Start Menu
 > Altair <version> >
> Altair <version> >  MotionView
<version>の順にクリックするか、Altair ConnectMeアプリを使用します(インストールされている場合)。
起動すると、下図のようにランチャーウィンドウが表示されます。
MotionView
<version>の順にクリックするか、Altair ConnectMeアプリを使用します(インストールされている場合)。
起動すると、下図のようにランチャーウィンドウが表示されます。図 1. ランチャーウィンドウ 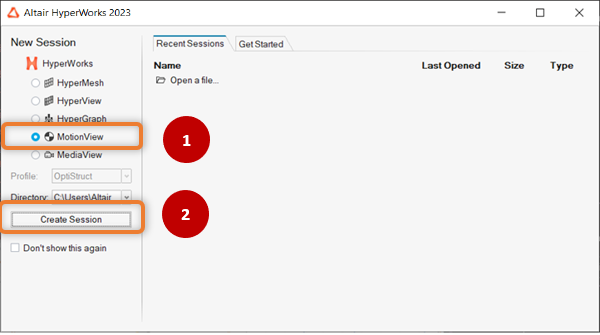
- MotionViewを選択し、新しいセッションを作成します。
-
Linuxの場合、開いているターミナルで
~hw_install/altair/scripts/mviewを起動します(~hw_installはインストール場所)。
- MotionViewインターフェース
-
新しいセッションが開始され、ページ / ウィンドウにMotionViewがアクティブクライアントとして表示されます。注: 1つのセッションは、1つまたは複数のページで構成できます。各ページは複数のウィンドウレイアウトを持つことができ、各ウィンドウはそれぞれ別のクライアントを有し、さまざまなモデリングニーズや結果確認ニーズに対応しています。以下のクライアントを使用できます:
- HyperGraph - プロッティング
- HyperMesh - 有限要素モデリング
- HyperView - アニメーション
- MotionView - マルチボディモデリング
- TableView - テーブル処理
- TextView - テキスト処理
図 2. インターフェース要素 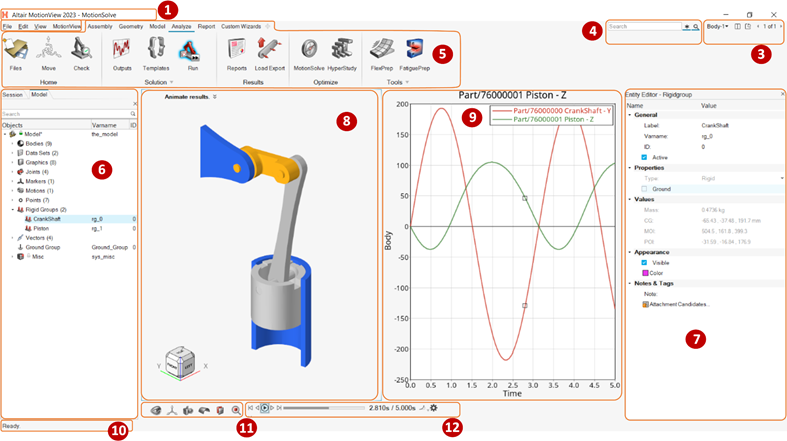
MotionViewは、以下のさまざまな領域で構成されています:- Title Barには、セッションファイル名とアクティブな製品バージョンが表示されます。
- Menu Barからは、リボン、ファイル管理操作などの標準機能、システムプリファレンス、ヘルプ、インターフェースの各種領域の表示設定にアクセスできます。メニューバーから、アクティブな製品を変更することもできます。
- Pages and Windowsを変更することで、メインの表示領域を制御できます。各ページは、最大16個のウィンドウを持つことが可能です。
- Searchでは、リボンからもアクセスできるさまざまなツールや機能をすばやく見つけることができます。
- RibbonはMotionViewの上部にあり、ここからツールや標準機能にすばやくアクセスできます。アイコンをクリックすると、関連ツールが開きます。アイコングループにサブレベルのオプションが存在する場合、そのオプション用のアイコンが表示されます。
- Model Browserには、モデルのさまざまなエンティティがツリーベースのフォーマットでリストされます。コンテキストメニューからは、ツリーの各ノードに対してコピー / ペーストや表示 / 非表示などのさまざまな操作を実行できます。
- Entity Editorには、選択したエンティティのすべてのプロパティがリストされます。
- Modeling Windowには、セットアップ中のモデルが表示されるほか、ソルバー実行時(MotionSolveのみ)および結果確認時にモデルがアニメーション表示されます。ここには、Guide Bar、Microdialog、Toolbelt、Entity Selection Filterなど、他のインタラクティブ領域も含まれています。
- Client Windowでは、HyperGraphやHyperViewなど、その他のクライアントを横に並べて操作できます。
- Status Barには、現在読み込まれているモデルに関する情報が示され、MotionViewのステータスが随時表示されます(ReadyやImporting Geometryなど)。
- View Controlsでは、モデリングウィンドウ内のモデルのビューと表示を制御できます。
- Animation Controlsでは、実行後にモデルのアニメーションを確認できます。
CAD形状のインポート
このステップでは、MotionViewでCAD形状ファイルをインポートする方法を学習します。
-
モデルブラウザからモデルのデフォルトのコンテンツを確認します。
図 3. モデルブラウザ 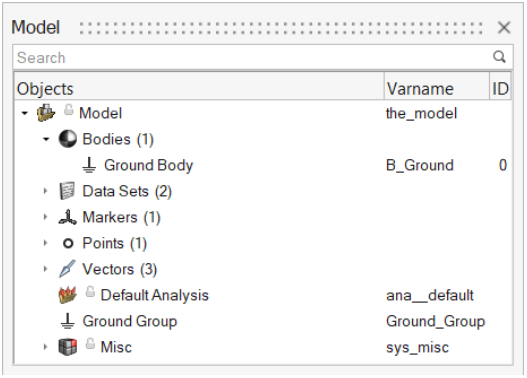
注: モデルブラウザの各エンティティフォルダーは、展開したり折りたたんだりしてそのコンテンツを確認でき、同じフォルダーに含まれているエンティティの数がかっこ内に表示されます。例えば、BodiesフォルダーにはデフォルトでGround Bodyがあります。Ground Bodyは、シミュレーション時に移動しません。 -
次のいずれかの方法でCAD形状をインポートします:
- PistonCylinderAssembly.x_tを作業ディレクトリからMotionViewクライアントのモデリングウィンドウにドラッグ&ドロップします。
- メニューバーからの順にクリックし、PistonCylinderAssembly.x_tを選択して、Openをクリックします。
形状がインポートされます。図 4. インポートされたCAD形状 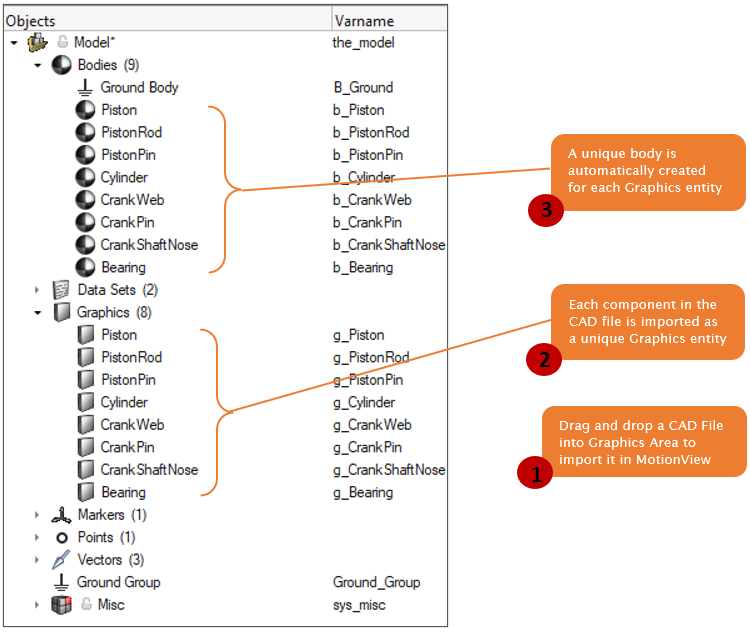
モデルブラウザを確認します。ここには、8つのBodies(Ground Bodyを除く)と8つのGraphicsエンティティが表示されています。形状がインポートされると、各CADコンポーネントはBodyエンティティと、CADGraphicsタイプの対応するGraphicエンティティで表されます。- Bodyエンティティは質量と慣性を表します。
- Graphicエンティティは、可視化や接触問題の解析に使用される形状オブジェクトです。
-
モデリングウィンドウでモデルを操作するには、以下のマウスコントロールを使用します:
- モデルをパン(Pan)するには、右ボタンを押しながらマウスをドラッグします。
- 回転(Rotate)するには、中央ボタン(またはShiftキー+右ボタン)を押しながらマウスをドラッグします。
- スクロールホイールを使用すると、マウスカーソルを中心にしてズーム(Zoom)できます。
-
モデリングウィンドウで、Piston(下図の緑色のコンポーネント)にカーソルを合わせます。このオブジェクトがハイライト表示され、このオブジェクトのラベルが吹き出しテキストで表示されます。このオブジェクトをクリックすると、このボディが選択されます。
図 5. モデリングウィンドウからの選択 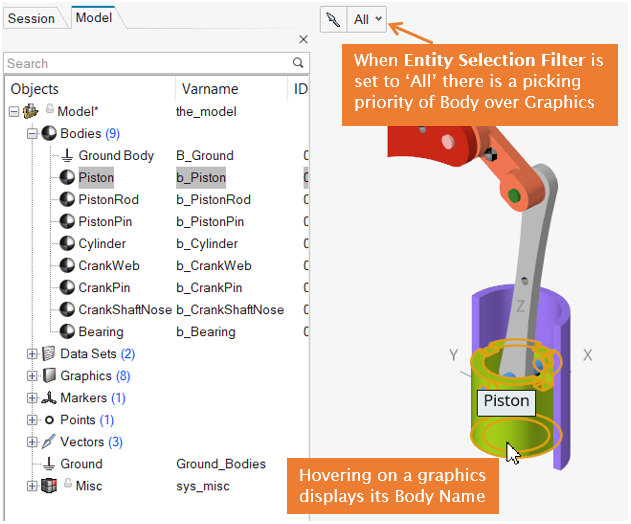
-
Entity Selection filter(モデリングウィンドウの左上)をAllからGraphicsに変更し、画面上の同じPistonオブジェクトをもう一度クリックします。
図 6. エンティティ選択フィルターの使用 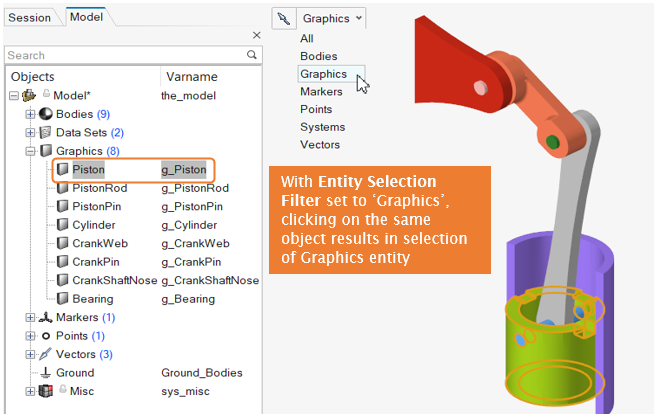
注: 今回は、Graphicsエンティティが選択されました(モデルブラウザで示されています)。 - モデリングウィンドウ内の空白領域をダブルクリックして、すべての選択を解除します。
- Entity Selection filterをAllに戻します。
モデルのセットアップ
このステップでは、モデルをセットアップする方法を学習します。
-
BearingボディとCylinderボディを接地します。
-
BearingボディとCylinderボディを選択します。
注: 選択したボディが赤色でハイライト表示されます。また、モデルブラウザには、これらのボディが接地アイコン
 付きで表示されています。
付きで表示されています。 -
空白領域で右クリックし、緑色のチェックマーク
 を選択してGroundコンテキストを終了します。
を選択してGroundコンテキストを終了します。
図 7. Ground Groupコンテキストでのボディの接地 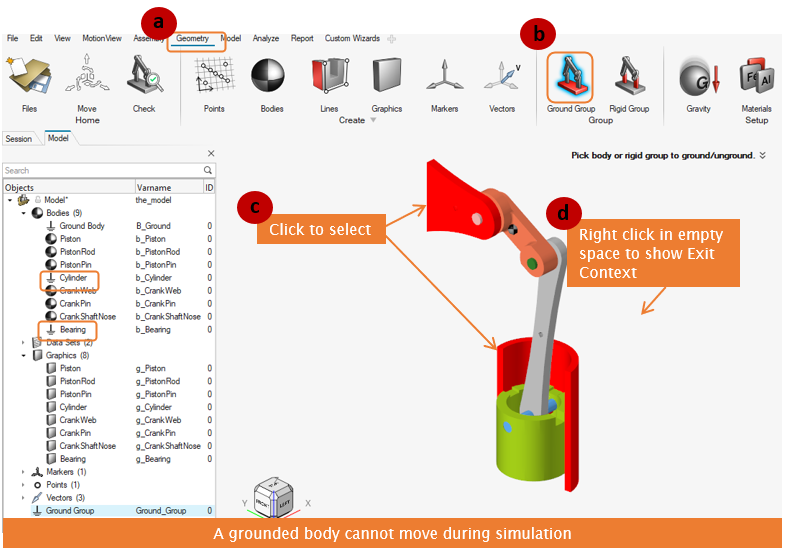
注:- 複数のボディを接地または接地解除する場合は、Groundコンテキストを使用すると便利です。
- ボディを右クリックして表示されるコンテキストメニューのGroundオプションを使用して、ボディを接地することもできます。
- モデルブラウザでGround Groupを確認します。このグループを選択すると、接地されているすべてのボディがハイライト表示されます。
- ボディが接地されると、この接地されたボディを親に持つエンティティは、解析時にGround Bodyに移動されます。
-
BearingボディとCylinderボディを選択します。
-
PistonHead Rigid Groupをセットアップします。
Rigid Groupは、互いに剛結合されているとみなされるボディの集合です。この概念はGround Groupと似ていますが、Rigid Groupは集合的に表され、解析時に1つの剛体として扱われる点が異なります。
-
マイクロダイアログ上の‘Group’ボタンをクリックして、選択したボディを含むRigid Groupを作成します。
図 8. Rigid Groupの作成 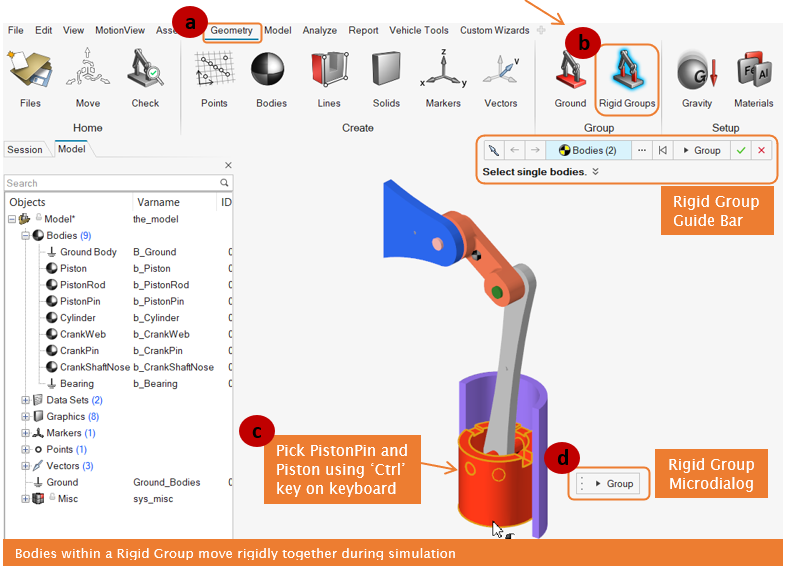
注: ‘RigidGroup 0’というデフォルト名で新規作成されたRigid Groupがモデルブラウザに表示されます。 -
エンティティエディターを使用して、RigidGroupのラベルを‘RigidGroup 0’から‘PistonHead’に変更します。
代わりに、モデルブラウザでオブジェクトを右クリックし、Change Label(キーボードショートカットはF2)を使用して名前変更することもできます。
図 9. エンティティエディターを使用したプロパティの編集 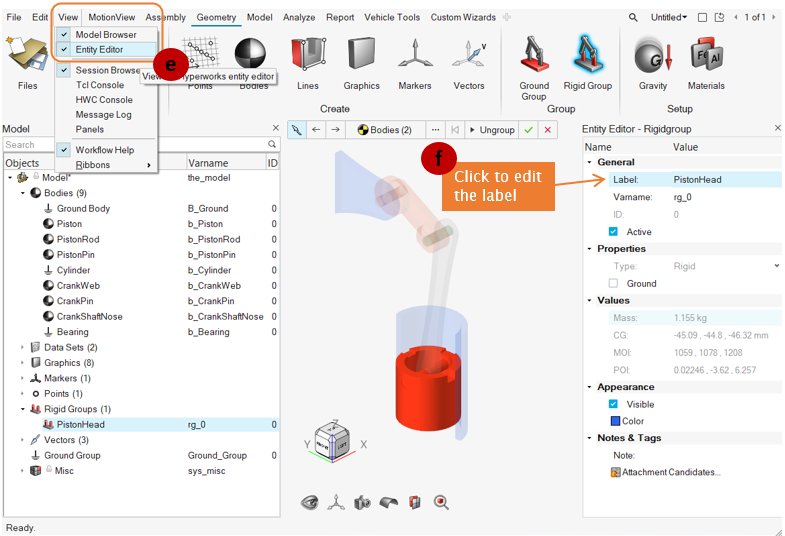
図 10. モデルブラウザを使用した名前変更 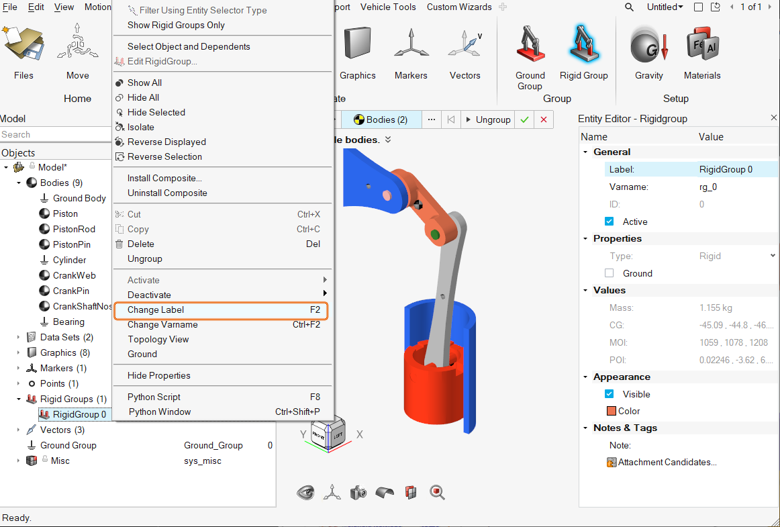
注: エンティティエディターには、選択されたエンティティのすべてのプロパティが表示されます。このエディターを使用して、プロパティをすばやく編集できます。現在、ウィンドウの下部領域には、従来のMotionViewインターフェースに存在するパネルがあります。これらのパネルは、同じプロパティを編集するために使用されます。今後のリリースでは、これらのパネルは削除され、エンティティエディターに置き換えられる予定です。ガイドバー上の緑のチェックマーク (Finish
Editing)をクリックし、編集を終了します。
(Finish
Editing)をクリックし、編集を終了します。コンテキストは再び‘Create’モードになります。
-
マイクロダイアログ上の‘Group’ボタンをクリックして、選択したボディを含むRigid Groupを作成します。
-
3つのボディCrankWeb、CrankPin、CrankShaftNoseを含む別のRigidGroupをセットアップします。RigidGroupの名前を‘Crank’に変更します(Rename)。
注: 詳しい手順については、前のステップ2(2)をご参照ください。
図 11. Crank RigidGroupの作成 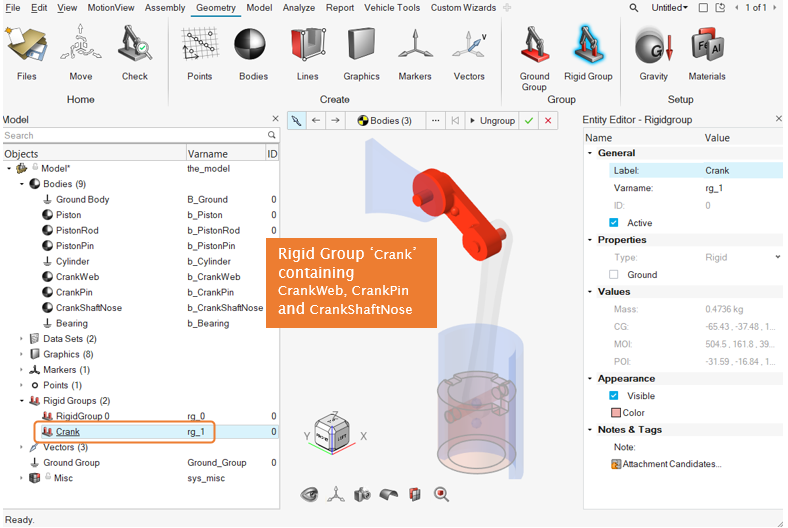
-
 (Finish Editing)を2回クリックして、Rigid Groupコンテキストを終了します。
(Finish Editing)を2回クリックして、Rigid Groupコンテキストを終了します。
または
モデリングウィンドウで右クリックし、緑色のチェックマーク
を選択してRigidGroupコンテキストを終了します。 -
モデルを保存
 します。
します。
図 12. リボンアイコンを使用したモデルの保存 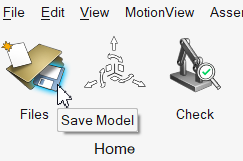
- HomeグループのSave Modelアイコンをクリックします。
- 表示されるSave As Modelダイアログで、作業ディレクトリに移動して、このファイルにMV_intro1.mdlという名前を付けます。
- Saveをクリックします。
注: モデルは、File Menu >Save As > Modelを使用して保存することもできます。 -
BearingとCrankの間に回転ジョイントを作成します。
-
Modelリボンタブに移動して、EntitiesグループのJointsアイコンをクリックします。
Jointsガイドバーが表示されます。Body 1コレクターがアクティブであることを確認します。ユーザーインターフェースは“選択”モードになっており、“Pick first body”というヘルプテキストが表示されます。
図 13. 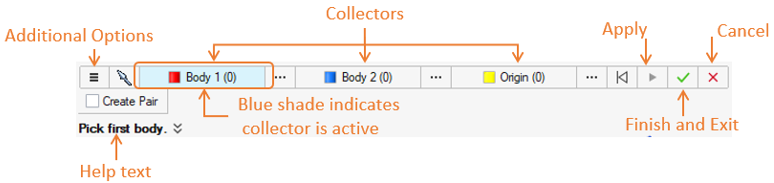
-
ジョイントの2つ目のボディとして、モデリングウィンドウからCrankShaftNoseボディを選択します。
注: CrankShaftNoseボディが青色でハイライト表示されます。Originコレクターがハイライト表示され、ジョイントの位置を決定するために、既存ポイントの選択または新規ポイントの作成が可能になります。このポイント選択モードでは、すべてのグラフィックスが半透明になり、ポイントを選択しやすいビューが提供されます。
図 14. コンテキストでのグラフィックスのハイライト表示 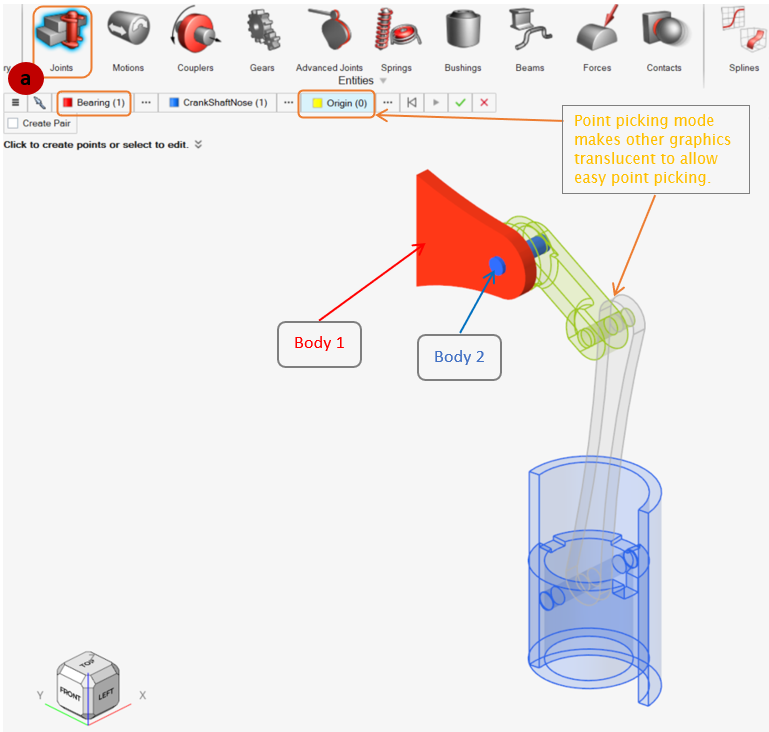
-
ジョイントの原点を定義するためのポイントを作成します。
- CrankShaftNoseと重なり合っている、Bearing(円筒サーフェス)の穴の中心付近にカーソルを合わせます(Hover)。これにより、赤い十字が表示され、サーフェスが白色でハイライト表示されます。必要に応じて、回転(マウスの中央ボタン)とズーム(スクロール)によりビューを調整します。
- クリック(Click)してここに新しいポイントを作成し、これを使用してジョイントの原点を定義します。
図 15. CAD参照を使用したジョイント原点の選択 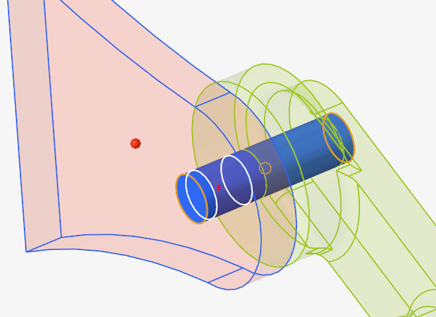
注: 新しいポイント‘Point 0’がモデルに追加され(Modelブラウザを参照)、ガイドバーのOriginコレクターがPoint 0に解決されていることがわかります。また、必要な参照がすべて解決されたため、ACreateボタンが配置されたマイクロダイアログが表示されています。図 16. ジョイントの作成 / 編集コンテキスト 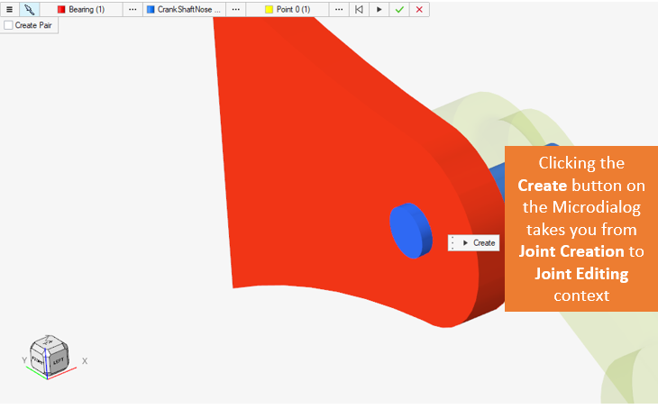
注: CAD形状を使用できる場合は、直線 / 円弧の中心点または終点、円の中心、平坦なサーフェスの中心など形状参照を使用して、下図のようにコレクターの解決時にその場で新しいポイントを作成できます。図 17. 形状参照を使用したポイントの作成 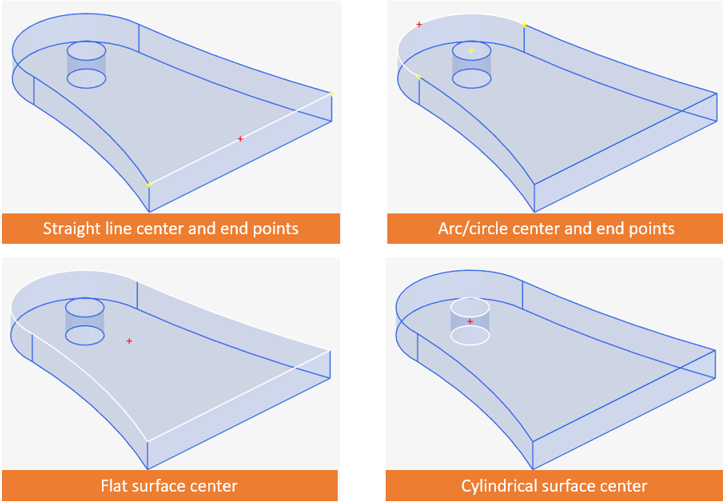
-
Joint typeをデフォルトのBallからRevoluteに変更します。
注: ガイドバーに、Orient Axisという新しいオプション(このジョイントタイプに適用可能)が表示されることを確認します。
図 18. マイクロダイアログを使用したジョイントタイプの変更 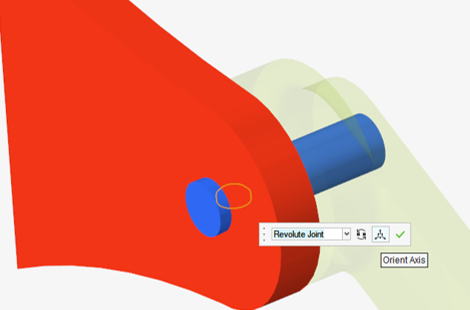
-
マイクロダイアログのOrient Axisボタン
 をクリックして、Orientationコンテキストに入り、回転ジョイント軸の方向を設定します。
回転ジョイントの方向定義に使用できるベクトルツールが表示されます。
をクリックして、Orientationコンテキストに入り、回転ジョイント軸の方向を設定します。
回転ジョイントの方向定義に使用できるベクトルツールが表示されます。図 19. Orientationコンテキストで使用できるベクトルツール 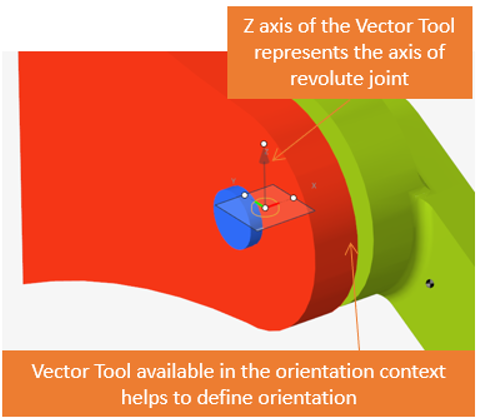
-
ドラッグして、グローバルX軸の方向を見つけます。
注: ハンドルをドラッグする際、カーソルがCAD形状の上にあるときはポイント / ベクトルがハイライト表示され、カーソルが空白領域にあるときは、グローバル軸がハイライト表示されることに注目してください。
図 20. ジョイントの方向設定に使用できるグローバル軸 
-
Global Xラベルに近づくと、このラベルが下線付きでハイライト表示されます(Global X)。マウスボタンを放してこれを選択します。
ヒント: グローバル軸を選択するときは、CAD形状の外でマウスボタンを放します。
これで、ジョイントのZ軸がグローバルX方向と揃えられました。
右クリックして表示されるExit Contextボタン
をクリックして方向設定を終了し、Jointコンテキストに戻ります。 -
ジョイントのマイクロダイアログにあるFinish Editingチェックマークボタンをクリックし、現在のジョイントの定義を完了します。
注: この段階で、現在のジョイント編集は完了し、コンテキストはジョイント作成状態になります。
-
Modelリボンタブに移動して、EntitiesグループのJointsアイコンをクリックします。
-
CrankPinをBody 1として、PistonRodをBody 2として、Crank Bossの内側サーフェス中心をジョイントのOriginとして使用して、回転ジョイントを作成します。ジョイントの方向としてGlobal Xを選択します。
図 21. CrankPinとPistonRod間の回転ジョイント 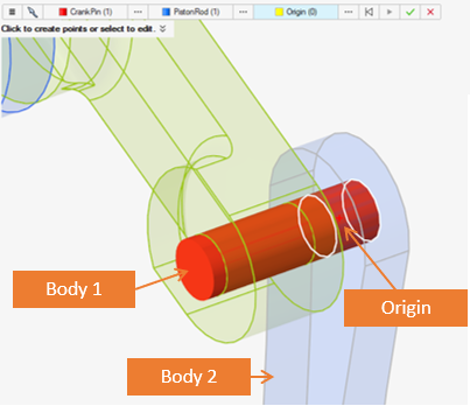
注: 前のジョイントと同じ方向設定手順に従ってください。 -
PistonRodをBody 1として、PistonPinをBody 2として、PistonRod穴のサーフェス中心をジョイントのOriginとして使用して、もう1つの回転ジョイントを作成します。
図 22. PistonRodとPistonPin間の回転ジョイント 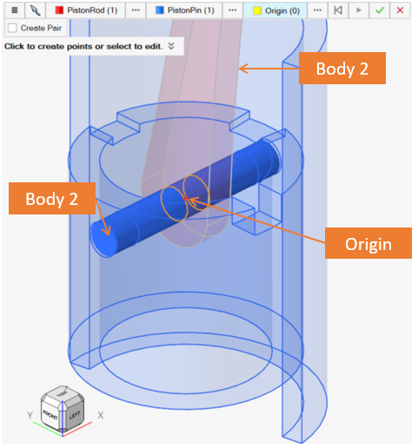
-
方向設定のために、選択方法
 をPointに変更します。下図のようにPistonRod穴のエッジ中心点を使用します。新しいポイントPoint
3が作成され、Point方法を使用してジョイントの方向が設定されます。
をPointに変更します。下図のようにPistonRod穴のエッジ中心点を使用します。新しいポイントPoint
3が作成され、Point方法を使用してジョイントの方向が設定されます。
図 23. PistonRodとPiston間の回転ジョイント 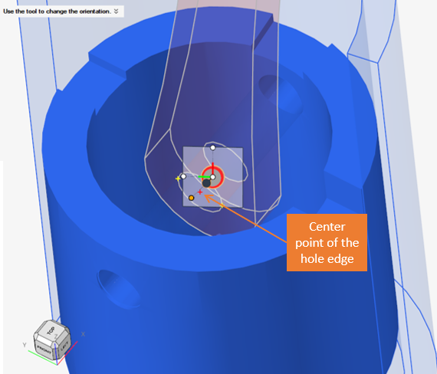
-
方向設定のために、選択方法
-
PistonをBody 1、CylinderをBody 2とし、Pistonの外側サーフェス中心をジョイントのOriginとする円筒ジョイントを作成します。ジョイントの方向としてGlobal Zを選択します。
図 24. PistonとCylinder間の円筒ジョイント 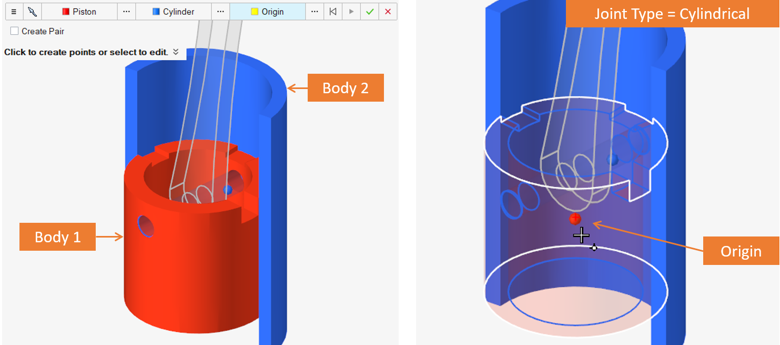
図 25. 円筒ジョイントの方向軸 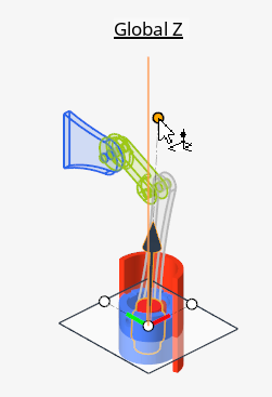
-
ガイドバーのCancelボタン
 をクリックして、Jointコンテキストを終了します。
をクリックして、Jointコンテキストを終了します。
-
Save
 をクリックして、モデルを保存します。
をクリックして、モデルを保存します。
-
View ControlsツールバーのFitアイコンをクリックして、モデルを画面いっぱいに表示します。
ヒント: キーボードショートカット“F”を使用して、モデルを画面いっぱいに表示することもできます。
モデルの解析
このステップでは、モデルを解析する方法を学習します。
-
1秒間の過渡解析を実行します。
-
リボンバーからAnalyze(解析)を選択し、Solution(ソリューション)グループのQuick
Start/Stop Motion Analysis(モーション解析の開始/終了)ボタンをクリックします。
図 26. クィックランの実行 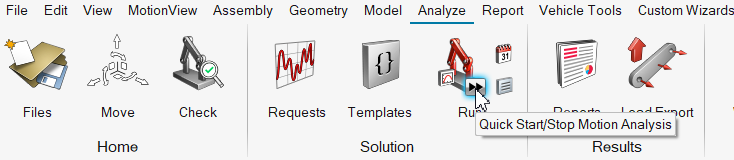
注: MotionViewはモデルチェックを実行してから、MotionSolveにランを投入します。モデルの動きは、解析の進行中にMotionViewウィンドウで確認できます。モデル内に力は定義されていませんが、パートはデフォルトの重力を受けて落下する際に動きます。Run Statusダイアログが開き、進行中の現在のランのステータスが表示されます。注: ランが完了すると、リボンのRunアイコン付近に青いチェックマークが表示され、ランが正常に完了して、モデルで結果が得られていることが示されます。ラン後に、モードは自動的にResults Reviewコンテキストに設定され、Runアイコンが青色でハイライト表示されます。図 27. ラン結果レビューのコンテキスト 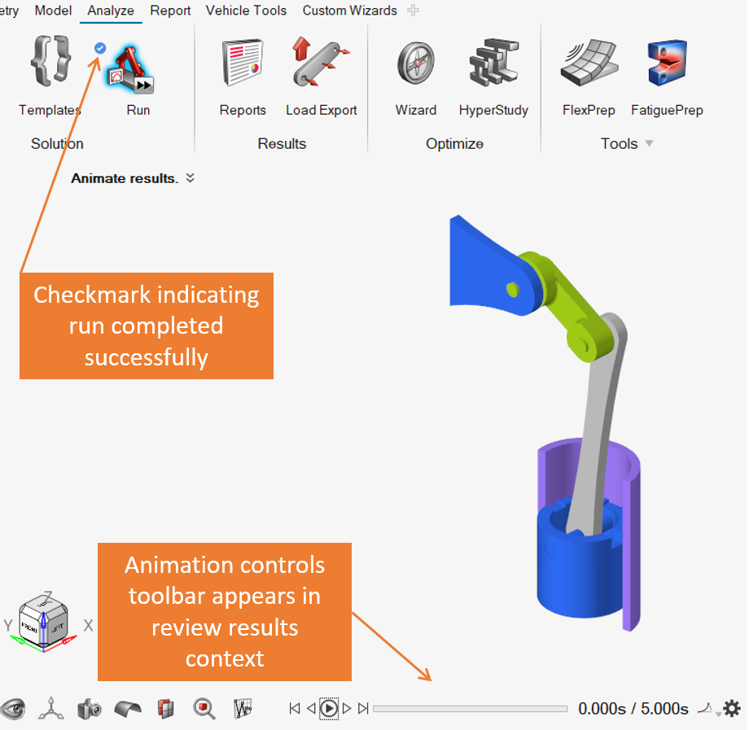
結果の確認
このステップでは、モデル結果をポスト処理する方法を学習します。
-
Play/Pauseボタンを使用します。スライダーをドラッグして特定のアニメーションタイムフレームを確認することもできます。
図 28. アニメーションコントロール 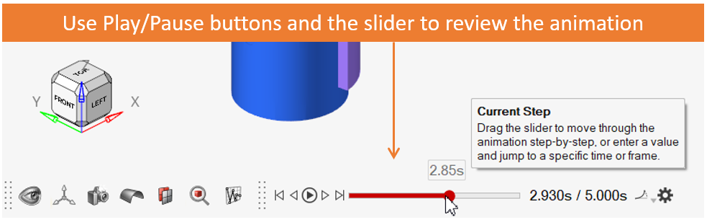
注: MotionViewクライアントでアニメーション表示されるポスト処理機能は限られています。 -
プロットを作成します。
- Run statusダイアログのPlotボタンをクリックします(または、実行エントリを右クリックし、コンテキストメニューからPlot Results on HyperGraphを選択します)。
HyperGraphクライアントを含む新しいページがセッションに追加され、Create Curves by Fileダイアログが表示されます。MotionSolve結果ファイル(*.mrf)があらかじめ選択されています。 -
シリンダーに沿ったピストンの変位を表すカーブをプロットします。
- TypesリストからBodyを選択します。
- RequestsリストからPart/76000000 PistonHeadを選択します。
- ComponentsリストからZを選択します。
- Plotをクリックしてから、Cancelをクリックします。
図 29. HyperGraphでのカーブのプロット 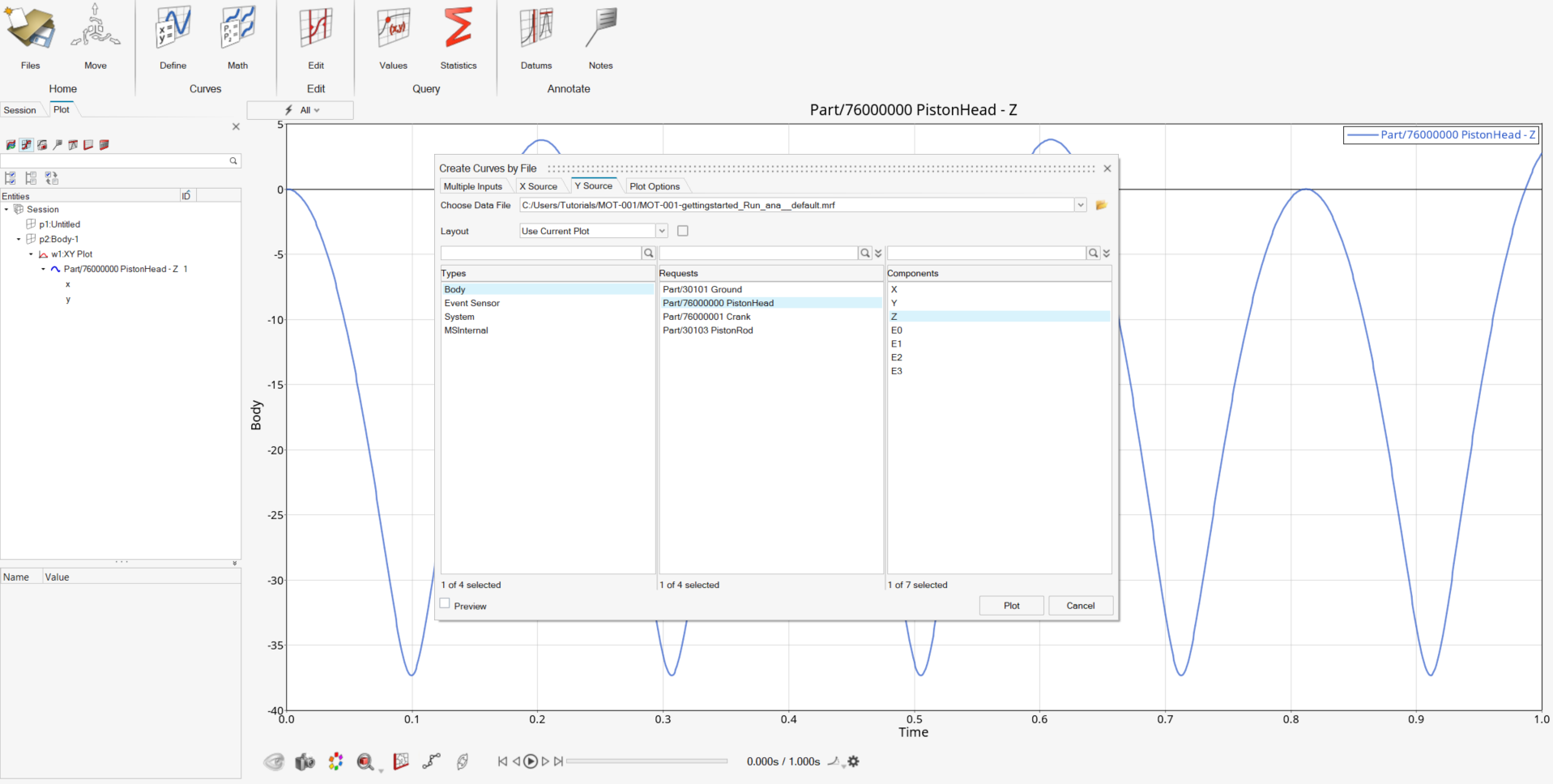
-
アプリケーションの右上にあるページナビゲーションアイコン
 を使用して、最初のページに移動します。
を使用して、最初のページに移動します。
-
メニューバーからの順にクリックします。
図 30. セッションの保存 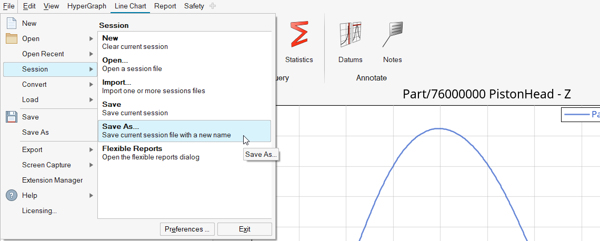
- 作業ディレクトリを選択し、セッションファイルをMV_Getting_Started.mvwとして保存します。
注: セッションを保存すると、そのセッション内のMotionViewモデルが自動的に保存されます。