
OS-T:1372 円筒形中空ローターのローターダイナミクス
本チュートリアルでは、円筒形中空ローターについて、ローターダイナミクス解析を行います。
開始する前に、このチュートリアルで使用するファイルを作業ディレクトリにコピーします。
回転するコンポーネントには、ジャイロ力や円運動減衰力などの力が存在し、それらは応答のスタディにおいて重要となります。システム全体での回転するコンポーネントの影響を判断することが重要です。ここでは、0、10K、30Kおよび50K RPMについて、複素固有値解析が実行されます。
解析の目的は、臨界周波数を特定し、ローターに静的不均衡が存在する場合のキャンベル線図を生成することにあります。臨界周波数では、前方 / 後方の円筒 / 円錐旋回(モード形状)が見られます。図 1. モデルのレビュー
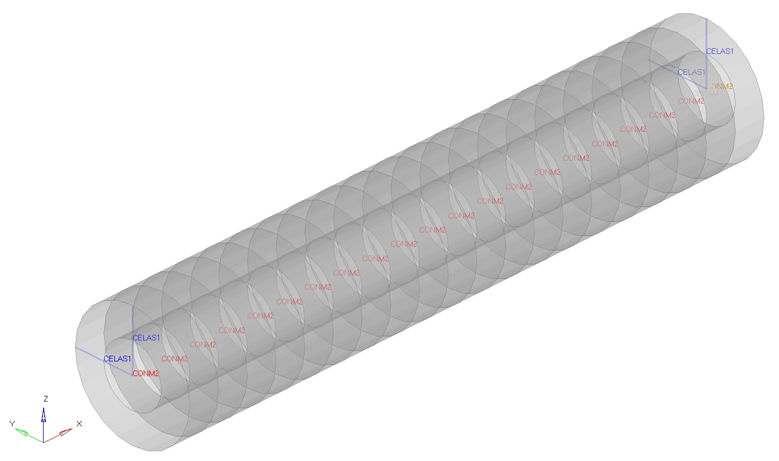
rotor.femファイルデータ
- ローターについて、梁要素を使って1次元ラインメッシュが生成されている
- ローターは、Material MAT1で定義されている
- ローターは、Beam Propertyで定義されている
- モデル内でSPC条件が定義されている
図 2. 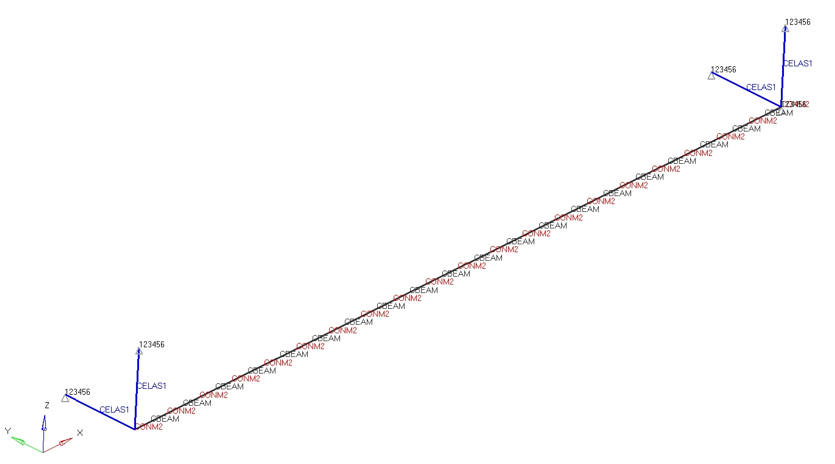
HyperMeshの起動とOptiStructユーザープロファイルの設定
-
HyperMeshを起動します。
User Profilesダイアログが現れます。
-
OptiStructを選択し、OKをクリックします。
これで、ユーザープロファイルが読み込まれます。ユーザープロファイルには、適切なテンプレート、マクロメニュー、インポートリーダーが含まれており、OptiStructモデルの生成に関連したもののみにHyperMeshの機能を絞っています。
モデルの読み込み
-
をクリックします。
Importタブがタブメニューに追加されます。
- File typeにOptiStructを選択します。
-
Filesアイコン
 を選択します。
Select OptiStruct Fileブラウザが開きます。
を選択します。
Select OptiStruct Fileブラウザが開きます。 - 自身の作業ディレクトリに保存したrotor.femファイルを選択します。
- Openをクリックします。
- Import、続いてCloseをクリックし、Importタブを閉じます。
モデルのセットアップ
Create EIGRL and EIGC Cards
- In the Model Browser, right-click and select .
- In the Name field, enter EIGRL.
- For Config type, select Real Eigen Value Extraction.
- For Type, select EIGRL from the drop-down menu.
-
Click V2 and input 250.0.
250.0 is defined as the highest frequency bond.
- Create another load step input named EIGC.
- For Config type, select Complex Eigen Value Extraction.
- For Type, verify the default EIGC is selected.
-
Click NORM and select MAX.
MAX option is used to normalize the eigenvectors.
- For ND0 OPTIONS, select User Defined from the drop-down menu.
-
Click ND0 and input 55.
The desired number of roots to be extracted is 55.
ローターラインモデル上の節点の定義
- Model Browserを右クリックし、を選択します。
- Nameをクリックし、ROTORG_SETと入力します。
- Card Imageをクリックし、ドロップダウンメニューからROTORGを選択します。
- Entity IDsをクリックし、nodesをクリックします。
- nodes by collectorをクリックしCBEAM、続いてproceedを選択します。
- RSPINR欄の横のボックスにチェックマークを入れます。これは、ROTORGを解して定義された各ローターには対応するRSPINRエントリーが必要であるためです。
- GRIDAの横の欄をクリックし、続いてNodeをクリックします。
- 選択のパネルでNodeをクリックし、ID=欄に10000と入力します。
- 同様に、GRIDBに10001と入力します。
- SPTIDの横の欄をクリックし、1.0と入力します。
RSPEED荷重コレクターの作成
- Model Browser内で右クリックし、を選択します。
- Nameをクリックし、RSPEEDと入力します。
- Card Imageをクリックし、ドロップダウンメニューからRSPEEDを選択します。
- S1をクリックし、0.0と入力します。これは、最初の参照ローター速度です。
- DSをクリックし、10000.0と入力します。これは、参照ローター速度の増分です。
- NDSをクリックし、5と入力します。これは、参照ローター速度の増分数です。
RGYRO荷重ステップ入力の作成
- Model Browser内で右クリックし、を選択します。
- Nameをクリックし、RGYROと入力します。
- Config typeをクリックし、ドロップダウンメニューからRotordynamic Analysis Parametersを選択します。
- Typeに、RGYROが選択されていることを確認します。
-
SYNCFLGをクリックし、ドロップダウンメニューからASYNCを選択します。
ヒント: これは、非同期ローターダイナミクス解析を実行するために設定されます。
- REFROTRをクリックし、setをクリックします。
- ROTORG_SETを選択し、OKをクリックします。
- SPEED_IDの横の欄にチェックを入れます。
- SPEEDの横の欄でをクリックし、ポップアップウィンドウからRSPEEDを選択します。
モーダル複素固有値解析の荷重ステップの定義
- Model Browser内で右クリックし、を選択します。
- Name欄にRotor Dynamicsと入力します。
- Analysis typeをクリックし、ドロップダウンメニューからComplex eigen (modal)を選択します。
- SPCに、荷重コレクターのリストからSPCを選択します。
- CMETHODに、荷重ステップ入力のリストからEIGCを選択します。
- METHOD(STRUCT)に、荷重ステップ入力のリストからEIGRLを選択します。
- SUBCASE OPTIONSの下で、RGYRO、続いてRGYRO_IDの横の欄にチェックマークを入れます。
- IDの横の欄をクリックし、荷重ステップ入力RGYROを選択します。
ジョブのサブミット
-
AnalysisページからOptiStructパネルをクリックします。
図 3. OptiStructパネルへのアクセス 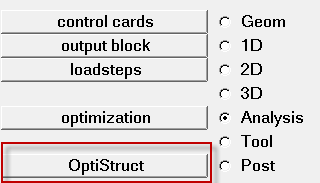
- save asをクリックします。
-
Save Asダイアログで、OptiStructモデルファイルを書き出す場所を指定し、ファイル名としてrotor_asyncと入力します。
OptiStruct入力ファイルには、拡張子 .femが推奨されます。
-
Saveをクリックします。
入力ファイル欄には、Save Asダイアログで指定されたファイル名と場所が表示されます。
- export optionsのトグルをallにセットします。
- run optionsのトグルをanalysisにセットします。
- memory optionsのトグルはmemory defaultにセットします。
- OptiStructをクリックし、OptiStructジョブを開始します。
モデルの実行
- Model Browser内で、RGYROカードをクリックします。
- SYNCFLGをクリックし、ドロップダウンメニューで、ASYNCをASYNCに変更します。
- Analysisページからパネルに入ります。
-
input file欄に続くSave asをクリックします。
Save Asブラウザウィンドウが開きます。
- ファイルを書き出したいディレクトリを選択し、ファイル名:欄に名称rotor_sync.femを入力します。
-
Saveをクリックします。
注: input file:欄には、ファイルの名称と位置が表示されるようになりました。
- export optionsのトグルをallにセットします。
- run optionsのトグルをAnalysisにセットします。
- memory optionsのトグルはmemory defaultにセットします。
- OptiStructをクリックします。これでOptiStructジョブが起動します。
ジョブが成功した場合、OptiStructモデルファイルが書かれたディレクトリに新しい結果ファイルがあるはずです。rotor_sync.outファイルには、エラーが表示された場合に入力デックのデバックを行う際の手助けとなるエラーメッセージが収められています。
結果の表示
-
HyperViewでrotor_async.outを確認します。キャンベル線図(Campbell Diagram)を作成し、交差ポイントにおける臨界周波数を確認するため、Campbell Diagram Instructionsを選択します。
図 4. 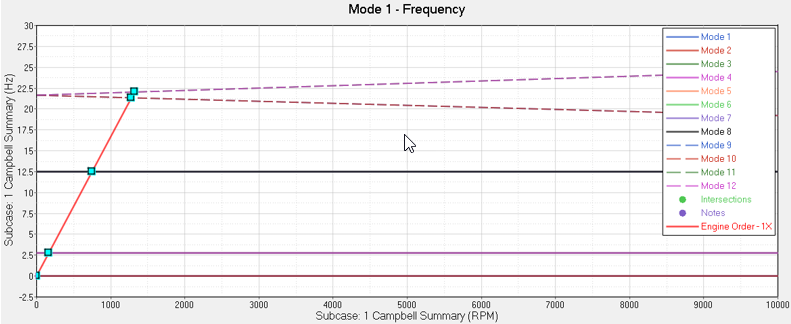
HyperView内のTableViewでは、臨界周波数についてのサマリーが与えられます。図 5. 
-
rotor_sync.outファイルをテキストエディタに読み込みます。
同期ローターダイナミクス解析から得られた周波数は、臨界周波数を表わしています。複素モードは虚部を含んでおり、それは振動の周波数を、その実部はモードの減衰を表しています。実部が負の場合、そのモードは安定していると言えます。実部が正の場合、そのモードは不安定となります。
図 6. 複素モードの固有値 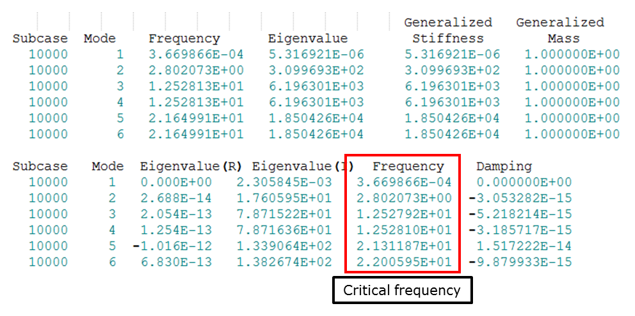
- 交差ポイントから得られた臨界周波数と、rotor_sync.outファイルで得られた周波数を比較して検討します。
-
rotor_async.h3dファイルをHyperViewに読み込み、以下の円筒および円錐モード形状を検証します。
RPM Cylindrical Modes Forward Mode #3
Cylindrical Modes Backward Mode #4
Conical Modes Forward Mode #5
Conical Modes Backward Mode #6
10000 2.802E+00 2.802E+00 1.248E+01 1.248E 30000 2.802E+00 2.802E+00 1.201E+01 1.201E+01 50000 2.802E+00 2.802E+00 1.058E+01 1.058E+1