方向付けの方法
MotionViewの座標系は、さまざまな方法で方向を指定できます。
- 1本の軸の方向指定 - ポイントまたはベクトルを使用して1本の軸の方向を明示的に指定し、MotionViewで残りの2本の軸の方向を計算できるようにします。この方法は、軸対称のエンティティの方向付けに使用されます。
- 2本の軸の方向指定 - ポイントまたはベクトル、あるいはその両方の組み合わせを使用して2本の軸の方向を指定し、MotionViewで3番目の軸の方向を計算できるようにします。
- オイラー角による方向指定 - モデルにある他の任意の座標系を基準としたオイラー角を指定することによって方向を指定します。
Orient by One Axis
Orient one axisの方法を使用して、軸対称のエンティティの方向を指定します。座標系の3本の軸のうちの1本を指定すると、MotionViewによって残りの2本が計算されます。
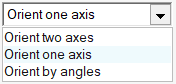
- orientation methodドロップダウンメニューでOrient one axisを選択します。
- axesドロップダウンメニューから、方向を指定する軸を選択します。
-
コレクターのコンボボックスを使用して、その軸のアライメント方法を指定します。
図 2. 
PointまたはVectorを選択した場合、コレクターを使用して、軸の方向を揃える基準とするポイントまたはベクトルを選択します。ポイントまたはベクトル成分は、ポイントまたはベクトルラベルの下に表示されます。座標値はロックで保護されており、ロックが緑色の場合には、修正が可能です。
pointについては、軸は、原点から指定のポイントに至るライン上に位置します。vectorを選択した場合、軸は、選択したベクトルと平行に位置します。
アライメント方法としてDxDyDzを選択した場合は、全体座標系の軸のdx、dy、dzの各成分をテキストボックスに入力します。また、任意のテキストボックスに数式を入力してdx、dyまたはdzを定義することも可能です。
Orient by Two Axes
Orient two axesの方法では、3本の軸のうちの1本の方向を正確に指定し、残りの2本のいずれかの方向を大まかに定義します。MotionViewは、外積を用いて3番目の軸の方向を計算し、別の外積を用いて2番目の軸の正しい方向を計算します。
- orientation methodドロップダウンメニューでOrient two axesを選択します。
- axesドロップダウンメニューから、方向を指定する軸を選択します。
-
コレクターのコンボボックスを使用して、その軸のアライメント方法を指定します。
図 3.
PointまたはVectorを選択した場合、コレクターを使用して、軸の方向を揃える基準とするポイントまたはベクトルを選択します。ポイントまたはベクトル成分は、ポイントまたはベクトルラベルの下に表示されます。座標値はロックで保護されており、ロックが緑色の場合には、修正が可能です。
pointについては、軸は、原点から指定のポイントに至るライン上に位置します。vectorを選択した場合、軸は、選択したベクトルと平行に位置します。
DxDyDzを選択した場合は、全体座標系の軸のdx、dy、dzの各成分をテキストボックスに入力します。また、任意のテキストボックスに数式を入力してdx、dyまたはdzを定義することも可能です。
- 残りの2本の軸のいずれかの方向を大まかに指定するには、planesドロップダウンメニューで、いずれかの平面を選択します。
-
コレクターのコンボボックスを使用して、2番目の軸の方向に一致する2番目のポイントまたはベクトルを選択します。
2つ目の軸は、2番目のポイントまたはベクトルと可能な限り近くに揃うよう、構築されます。3つ目の軸は、外積を使って計算されます。
Orient by Angles
Orient by anglesの方法では、別の座標系を基準として、オイラー角によって座標系の方向を指定します。オイラー角はテキストボックスに入力され、参照座標系がRef Markerコレクターで指定されます。3つのオイラー角は、Z、X'およびZ''とラベル付けされます。これらは、参照座標系から3つのシンプルな回転を連続で行うために使用されます。
- orientation methodドロップダウンメニューでOrient by anglesを選択します。
- Ref Markerコレクターをクリックしてモデリングウィンドウから参照座標系を選択するか、同じコレクターをダブルクリックしてモデルツリーを開きます(ここから目的のマーカーを選択できます)。
-
ZX'Z"コレクターをダブルクリックします。
Euler Anglesダイアログが表示されます。
- 相互のZ軸を中心として座標系をZ度回転させます。
- 新しいX軸を中心として座標系をX'度回転させます。
-
新しいZ軸を中心として座標系をZ''度回転させます。
注: 2つの座標系が互いに一致したものにするには、オイラー角として0, 0, 0を入力します。モデルに変更が加わっても、座標系は参照座標系と平行のままとなります。
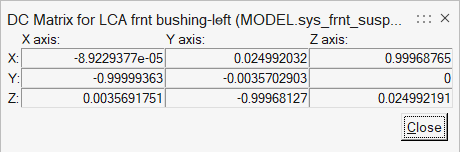
方向余弦
方向余弦のマトリックスは、座標を全体座標系参照フレームから現在の座標系に変換する変換マトリックスです。方向余弦マトリックスの3つの列は、全体フレームでの座標系のx、yおよびz軸に沿ったユニットベクトルです。
座標系の方向余弦のマトリックスを表示するには[DC]をクリックします。