エンティティの移動、回転、配置
Move ツールを使用して、選択したエンティティを移動、回転、配置します。
-
Home(ホーム)ツールからMoveツールをクリックします。
図 1. 
デフォルトの移動モードはインタラクティブに設定されています。注: HyperMeshでは、Moveツールは、変換、Mirror、Scaleツールと同じリボングループの一部です。アイコンの横にある矢印をクリックすると、現在アクティブでないツールが表示されます。 - オプション:
ガイドバーの
 をクリックして、移動オプションを指定します。
をクリックして、移動オプションを指定します。
- ガイドバーセレクターでエンティティ タイプを選択します。
-
移動するエンティティを選択します。
Moveツールは、選択されたエンティティの中央に配置されます。
-
グラフィカルマニピュレーターをクリックし、以下の操作を行います:
- グラフィカルマニピュレーターをドラッグして、選択した方向にエンティティを移動または回転します。
- マイクロダイアログに値を入力し、Enterを押します。
目的 操作 軸方向の平行移動 X矢印、Y矢印、またはZ矢印をクリックします。 図 2. 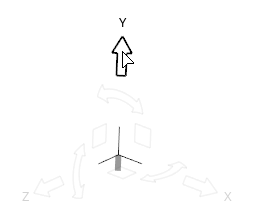
平面上での平行移動 XY平面、XZ平面、またはYX平面の四角をクリックします。 図 3. 
3D空間での自由移動 Moveツールの原点をクリックします。 図 4. 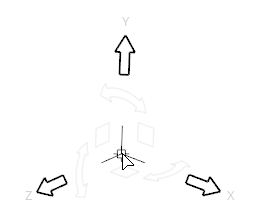
ヒント: マイクロダイアログのアイコンを使用してパートまたはグローバル軸にツールを揃えます。軸中心の回転 曲線矢印をクリックします。 図 5. 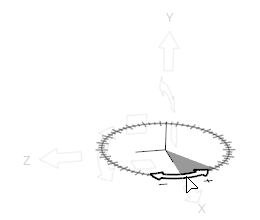
自由回転 移動ツール上のX矢印、Y矢印、またはZ矢印の先端  をクリックします。
をクリックします。図 6. 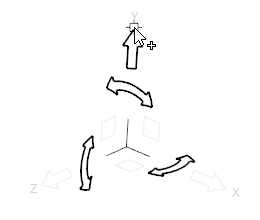
ヒント: snap pointsを使用して複数のエンティティを揃えるには、1つ目のエンティティ上のスナップポイントをクリックして、2つ目のエンティティ上のスナップポイントにドラッグします。
Moveツール位置の変更
平面または3D空間の中で軸に合わせてMoveツールを再配置し、回転の中心を変更します。
-
Home(ホーム)ツールからMoveツールをクリックします。
図 7.
デフォルトの移動モードはインタラクティブに設定されています。注: HyperMeshでは、Moveツールは、変換、Mirror、Scaleツールと同じリボングループの一部です。アイコンの横にある矢印をクリックすると、現在アクティブでないツールが表示されます。 -
以下の方法で編集モードに入ります。
- Shiftを押す。
- グラフィックマニピュレータの1つをダブルクリック。
Moveツールがオレンジ色になり、再配置の準備が整ったことを示します。 - 移動や回転と同様、グラフィックマニピュレータおよびマイクロダイアログを使用して、ツールを再配置します。
-
Shiftキーを放すか、空白領域を左クリックして、編集モードを抜けます。
Moveツールが白色で表示されます。
マイクロダイアログオプション
Moveツールの原点をクリックした場合:

- Moveツールのデフォルトの方向と位置を合わせます。
- 1回クリックすると、グローバル座標系、またはローカル座標系が割り当てられている場合はその座標系に一致するように方向がリセットされます。
- 2回クリックすると、その位置は、選択した範囲の中心、またはローカル座標系が割り当てられている場合はその原点にリセットされます。

- Moveツールをエッジまたはフェイスに揃えます。Moveツールの位置を変更している場合(オレンジ色でハイライト表示されます)、このボタンをクリックすると、Moveツールをモデル内でドラッグしたときに、このツールが強制的に自動整列されます。

- ローカル座標系を選択してMoveツールに割り当てます。新しいシステムを割り当てた後、Moveツールは自動的に原点に再位置決めされます。注: 現在、Moveツールは直交座標系のみサポートしています。
ヒント: Moveツールにローカル座標系が割り当てられると、systemボタンに が表示され、マニピュレーターがローカル座標系モードになったことを示します。もう一度このボタンをクリックすると、割り当てられた座標系が変更され、リセットするとグローバルシステムモードに戻ります。
が表示され、マニピュレーターがローカル座標系モードになったことを示します。もう一度このボタンをクリックすると、割り当てられた座標系が変更され、リセットするとグローバルシステムモードに戻ります。
平行移動または回転の矢印をクリックしたとき:

- ベクトルツールを使って1つの方向を定義します。
- Δ
 ボタンを使って、選択した方向にインクリメンタルな移動または回転を適用します。
ボタンを使って、選択した方向にインクリメンタルな移動または回転を適用します。
ヒント: Vectorツールを使って2つのスナップ間の方向を定義する場合、Δ増分フィールドには対応する距離も自動的に入力されます。
干渉認識
コンポーネント同士の貫通の発生を防ぎます。
制約事項: コンポーネントのみで利用できます。
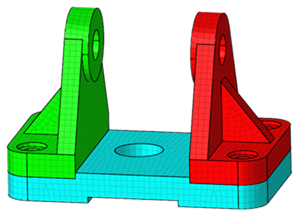
Moveツールのデフォルトの挙動では、コンポーネントが相互に貫通することが許可されており、コンポーネント同士が重なり合うことは禁止されていません。図 8.
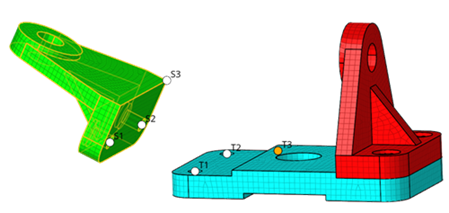
干渉認識オプションをアクティブにした場合、2つのコンポーネントの一方を動かしてこれらのコンポーネントを干渉させようとすると、コンポーネントが干渉ポイントまたはそれより前で止まります。この位置を越えてコンポーネントをドラッグしようとすると、このコンポーネントは貫通していない位置に留まり、この動きをブロックしているコンポーネントのフィーチャーエッジがオレンジ色でハイライト表示されます。ブロックしているコンポーネントを貫通するようにコンポーネントをドラッグし続けた場合、ドラッグされたコンポーネントは再び動き出し、次の干渉に遭遇した時点で止まります。図 9.
配置モードを使用したエンティティの配置
ソース位置とターゲット位置を指定して、エンティティを配置します。
-
Home(ホーム)ツールからMoveツールをクリックします。
図 10. 
- ガイドバーから、モードをInteractiveからPositionに変更します。
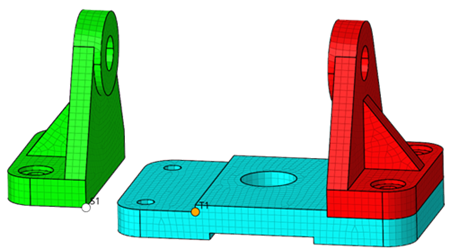
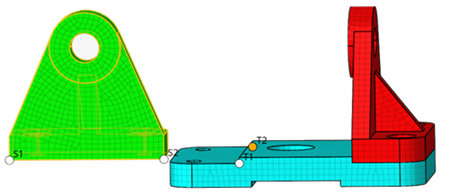
- ガイドバーからSourceをクリックし、モデリングウィンドウでソース位置を最大3つ選択します。
- モデリングウィンドウで、Targetを選択し、同数のターゲット位置を選択します。
- オプション:
をクリックし、Show previewを選択して更新した位置をプレビューします。
-
ガイドバーで、下記のオプションのいずれか1つを終了します:
 をクリックして適用し、ツールを開いたままにします。
をクリックして適用し、ツールを開いたままにします。 をクリックして適用し、ツールを閉じます。
をクリックして適用し、ツールを閉じます。 をクリックし、適用せずにツールを終了します。
をクリックし、適用せずにツールを終了します。
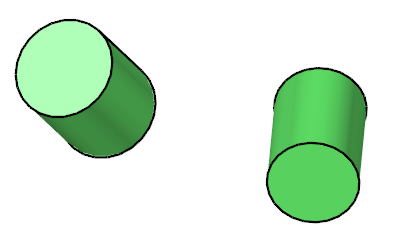
例:2つのソリッドの位置合わせ
-
Home(ホーム)ツールからMoveツールをクリックします。
図 16.
- セレクターをSolidsに設定し、左側の円筒を選択します。
-
ツールを円筒のフェイスに揃えます。
-
軸の原点を円筒面の中心にあるスナップ点までドラッグします。
図 17. 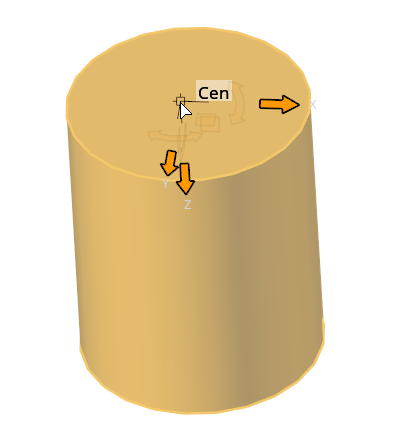
-
X矢印の先端にある
 をクリックし、フェイスのエッジ上のスナップポイントまでドラッグします。
をクリックし、フェイスのエッジ上のスナップポイントまでドラッグします。
図 18. 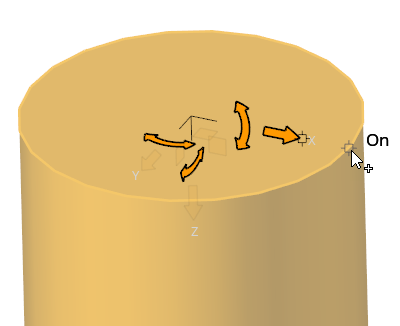
-
Z軸のカーブした矢印を、フェイスのエッジ上のスナップポイントまでドラッグします。
この軸を回転させると、他の2つの自由度がロックされます。
図 19. 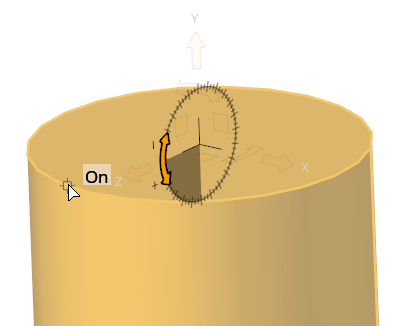
ヒント: マイクロダイアログのをクリックして、選択したパートにツールを自動的に位置合わせすることもできます。この方法は多くの場合に有効ですが、得られる結果は、選択したパートの位置と形状に依存します。したがって、複雑なシナリオでは、(上記のように)原点と軸を手動で再配置することが、より確実なMoveツールを使った位置合わせ方法です。 -
軸の原点を円筒面の中心にあるスナップ点までドラッグします。
-
円筒を平行移動して回転させ、他の円筒と位置合わせします。
-
軸の原点をもう一方の円筒面中心にあるスナップ点までドラッグします。
図 20. 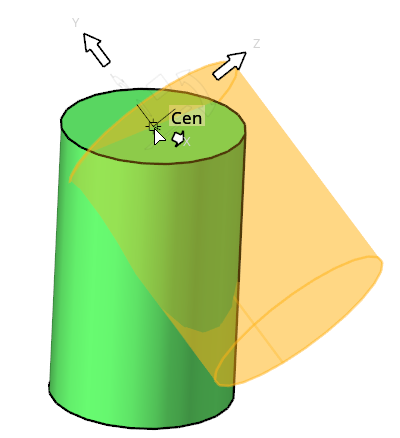
-
X矢印の先端にあるをクリックし、ターゲットフェイスのエッジ上のスナップポイントまでドラッグします。
図 21. 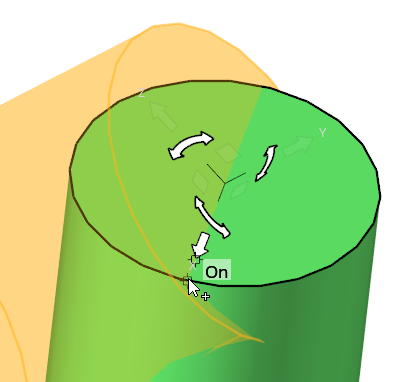
-
Z軸のカーブした矢印をターゲットフェイス上のスナップポイントまでドラッグして整列を終了します。
図 22. 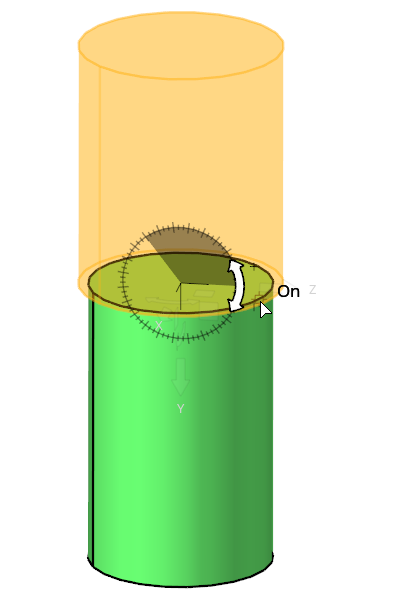
図 23. 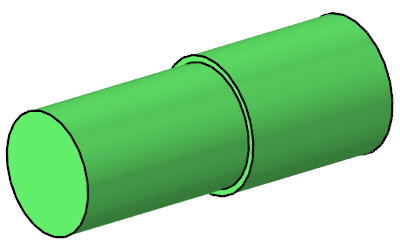
-
軸の原点をもう一方の円筒面中心にあるスナップ点までドラッグします。