クローラ・履帯の作成
ラップのタイプ
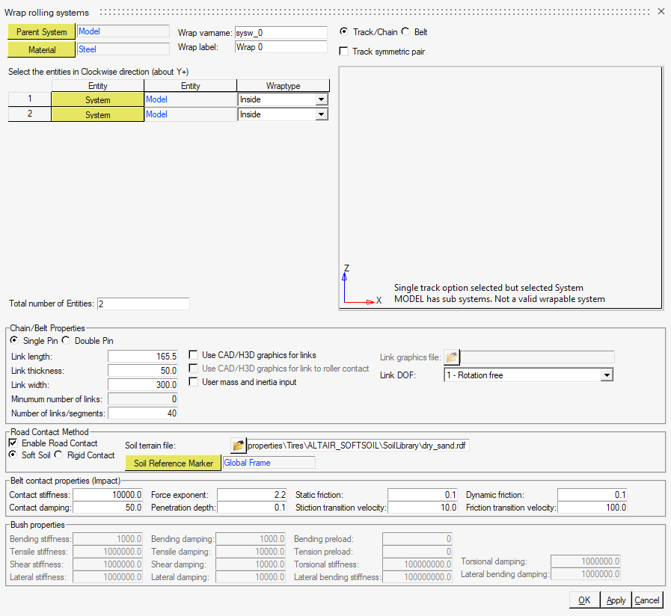
異なるタイプのラップを作成するために、Track/ChainまたはBeltオプションを使用できます。ラップのタイプは、適用される接触に応じて異なります。CAD/H3D graphicsオプションを使用しない場合、Track/Chainでは、スプロケットとトラックの間は球-球の接触を、他のエンティティと履板の間は球-ボックスの接触を使用します。ベルトでは、すべてのエンティティとベルトの間に球-球の接触を使用します。
転動体システムのラップ
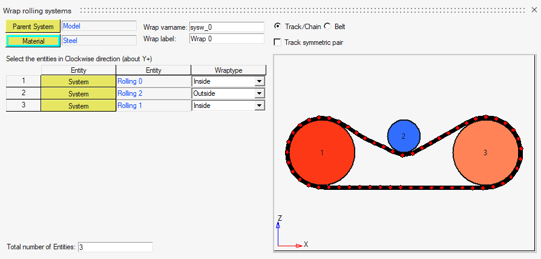
必要なデータが入力されると、ダイアログにラップシステムのプレビューが自動的に表示されます。入力されたデータに問題がある場合、プレビューエリアの下部にエラーメッセージが表示されます。カテナリ曲線は、最低必要量以上のリンクが存在する場合に含まれます。逆に、リンクの数が最小数より少ない場合、履板が開きます。その場合、シミュレーション時にギャップを閉じるために、最初のリンクと最後のリンクをつなぐフレキシブルな剛性エンティティが作成されます。これは、シミュレーションを開始すると同時に履板に引張荷重がかかるため、設計上好ましいとされています。

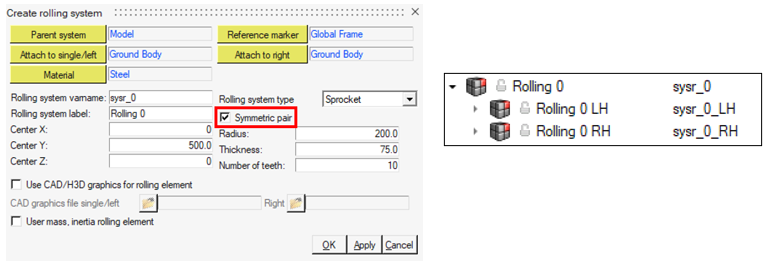
Symmetric pairオプションを有効にしたWrapping rolling systemsダイアログでは、転動体親システムを選択する必要があります。転動体システムがペアとして作成されたが、個別にラップする必要がある場合は、Track symmetric pairオプションを選択解除し、左(LH)または右(RH)のシステムを選択して個別のラップを作成します。単一のクローラ・履帯を作成する際は、すべて右またはすべて左の転動体コンポーネントを選択するという一貫した選択を行うことが重要です。
クローラ・履帯のプロパティ
Use CAD/H3D graphics for link to roller contactsオプションを選択すると、転動体システムのCADまたはH3Dファイルの間の3D剛体接触が有効になります。転動体コンポーネントにCAD/H3Dファイルがない場合は、このオプションを使用できず、“Contact graphics not found”というメッセージがクローラ・履帯プレビューウィンドウに表示されます。
ユーザー定義の質量と慣性は User mass and inertiaオプションを使用して入力できます。この場合、ラップシステムのデータセット内でクローラ・履帯リンクのプロパティを編集できます。
| リンクDOF (自由度) | 結合 | 横方向の拘束 | サポートされる形状オプション |
|---|---|---|---|
| 1 - 回転自由 | すべてのリンクに回転ジョイント、最初のリンクと最後のリンクの間にインラインジョイントを適用。 | Planar | プリミティブとCAD |
| 1 - 回転と曲げ剛性 | すべてのリンクに回転ジョイント、最初のリンクと最後のリンクの間にインラインジョイントを適用。回転剛性と曲げ予荷重は、すべてのリンク間でサポートされます。 | Planar | プリミティブとCAD |
| 2 - 引張と曲げ剛性 | すべてのリンクに平面ジョイントと面内プリミティブジョイントを適用。すべてのリンク間の回転剛性と曲げ予荷重に加えて、引張剛性と引張予荷重にも対応しています。 | Planar | プリミティブとCAD |
| 6 - 全方向の剛性 | 全リンク間の引張剛性と引張予荷重。このオプションは、回転、横方向、せん断、ねじり、横方向の曲げ剛性に加えて、すべてのリンク間の予荷重をサポートします。 | None | CADのみ |

路面接触法
- Soft Soil
- Rigid Contact
- Soft Soil
- AltairのSoft Soil Trackモデルは、粘土質、乾燥砂、表土、氷で覆われた雪面などの圧縮可能なサーフェス上で履帯システムが示す動的な挙動をシミュレートする方法を提供します。詳細については、Soft Soil Trackモデルをご参照ください。
MotionViewでは、クローラ・履帯と土壌の接触の式を記述した各クローラ・履帯リンクの中心に、フォースエンティティが作成されます。クローラ・履帯のプロパティで定義されたパラメータが土壌相互作用の計算に使用されます。クローラ・履帯リンクの形状によっては、リンク形状の更新に示すようにクローラ・履帯リンク形状を更新する必要があります。
軟質土壌相互作用オプションを選択した場合、Soil Terrain fileおよびSoil Reference Markerプロパティが表示されます。図 9. Road Contact Methodダイアログ 
Soil Terrainファイルには、軟質土壌とクローラ・履帯の土壌のパラメータを記述した軟質土壌路面モデルが必要です。すぐに使用できるさまざまな土壌の路面データファイルを収めた軟質土壌路面ライブラリは、インストール環境(<Installation>\hwdesktop\hw\mdl\autoentities\properties\Tires\ALTAIR_SOFTSOIL)にあります。軟質土壌路面モデルの構築方法の詳細については、路面モデリングをご参照ください。
Soil Reference Markerでは、土壌の原点を配置するマーカーエンティティを設定する必要があります。 - Rigid Contact
- 剛体接触の土壌相互作用では、Terrain Graphics Filesで指定されたクローラ・履帯形状と路面形状の間でMotionSolveの3D剛体接触法を使用して、クローラ・履帯と路面のダイナミクスを捕捉します。
図 10. 剛体接触の土壌相互作用のダイアログ 
Terrain Graphicsファイルには、接触のモデリングに関するMotionViewとMotionSolveの推奨事項に従ってCADまたはH3Dグラフィックスが必要です。詳細については、ContactsおよびMotionSolveで3D接触モデルを実行するための最良の方法をご参照ください。
接触摩擦パラメータのStatic and Dynamic friction、Stiction transient velocity、Friction transition velocityは、剛体接触の土壌相互作用オプションで変更できます。垂直抗力接触パラメータは、Contact Propertiesセクションで指定します。
クローラ・履帯システムの作成後は、ラップシステムのデータセット内ですべてのパラメータを変更できます。
Contact Properties

クローラ・履帯システムの作成後は、ラップシステムのデータセット内ですべてのパラメータを変更できます。
出力
- クローラ・履帯の引張力 - 局所座標系のクローラ・履帯リンクの接続ジョイントまたはブッシュにかかる前後力を測定することで、クローラ・履帯内の引張力を出力します。
- 接触力 - 各転動体コンポーネントに対する各リンクの接触力を出力します。