シングルモーター搭載の電動パワートレイン
アーキテクチャ
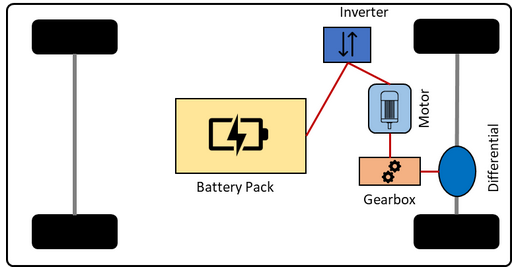
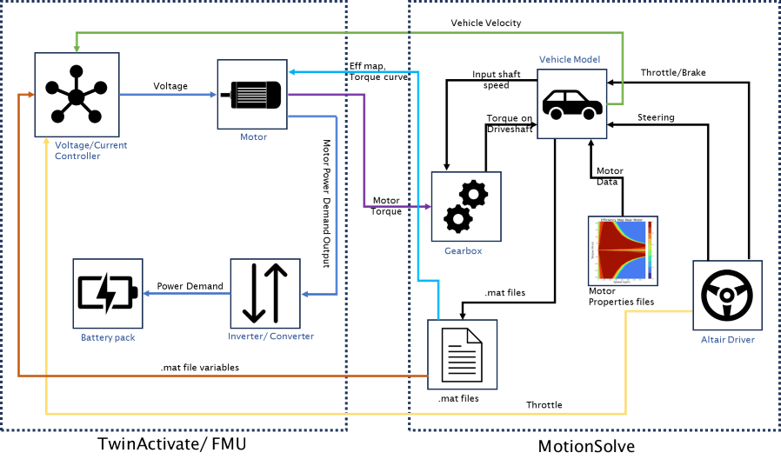
Twin Activateのパワートレインアーキテクチャ

- 永久磁石同期モーター
- 永久磁石同期モーター(PMSM)の包括的なモデルは、その速度-トルク特性と効率データに基づいて構築されます。この情報は、モーターのトルク-速度特性曲線とトルク-速度-効率特性曲線を含む外部効率マップファイル(.efmp)から得られます。このデータは、適切な変数を含む.matファイルの形式でルックアップテーブルを通じて明示的に取得されます。この手法では、ユーザー定義の電気モーターデータを車両シミュレーションに取り込むことができ、消費電力の正確な計算が保証されます。トルク-速度特性曲線は、下の図に示すように、モーターのトラクション(正)領域と回生制動(負)領域の両方のトルク境界を示すため、特に重要です。これらの境界は、対応する速度においてモーターが生成できる最大の正 / 負トルクを表します。PMSMモーターの特性には、定トルク領域と定出力領域という2つの領域が含まれます。モーターは定格速度まで最大トルクを提供し、その後は、最大出力を提供できます。
図 4. トルク-速度特性曲線 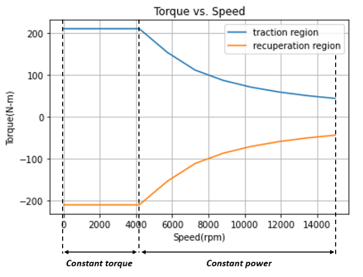
トルク-速度-効率曲線は、効率マップとも呼ばれ、各モーターの効率値をその動作領域に応じて示します。この曲線には、モーターのトラクション領域と回生制動領域の情報も含まれています(下図を参照)。図 5. トルク-速度-効率特性曲線 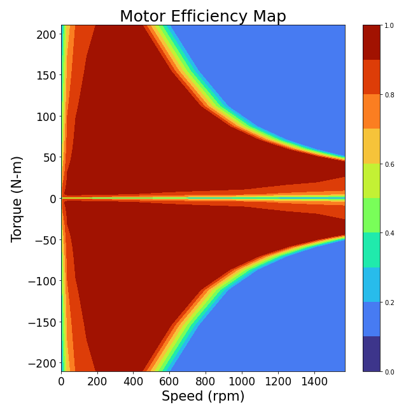
- 電圧-電流コントローラー
- 電圧-電流コントローラーブロックは、モーターに供給されるACの制御に使用されます。制御電圧は、車両速度、モーター速度、アクセルペダル入力、およびバッテリー充電状態によって異なります。モーターに加える適切な電圧を決定するために、このコントローラーはパルス幅変調(PWM)を使用し、トルクのルックアップテーブルを参照します。さらに、電圧は、バッテリーの充電状態(SOC)によって課される制約を受けます。特に、バッテリーのSOCが80%を超えると、コントローラーは回生制動を禁止することで、バッテリーセルの整合性が損なわれないようにします。このような制動は損傷をもたらす可能性があるためです。逆に、バッテリーのSOCが20%を下回った場合も、同じくバッテリーセルの保護措置として、バッテリーは電流を供給しなくなります。PWMルックアップテーブルは、車両速度とアクセルペダル入力からPWM値を計算するために使用されます。PWM値は0~250の範囲です。50という値は惰行に使用されます。つまり、この値では、モーターが出力するトルクは0です。PWM値が50を下回ると、モーターは発電機として機能し、回生モードに入ります。50を上回るPWM値は、モーターがトラクションに対して正のトルクを提供していることを意味します。惰行領域は、2つの別々の境界で構成されています(下図を参照)。
図 6. スロットルペダルの上下の惰行境界とさまざまな車両速度のマッピング 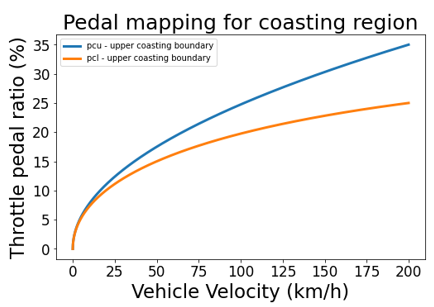
上図で、pcuより上の領域はトラクション領域で、下の境界(pcl)より下の領域は回生領域です。これらの境界間の惰行帯は車両速度と共に増加します。この拡大は、車両速度が速いときにアクセルペダルの感度を下げることを目的とした意図的な設計上の選択です。
パワートレイン内の回生トルクは、通常のトラフィック状態での車両を制動するために使用できます。モーターは、都市での運転で1つのペダルだけを使用して車両を操作するのに十分な負のトルクを提供します1。 車両速度が速い場合は、回生トルクだけでは車両を停止させるのに十分ではないため、摩擦制動を使用する必要があります。このモデル内の回生トルク比率は、下の図に示すように、車両速度に伴って変化します。図 7. モーターの利用可能なトルクの回生トルク比率と車両速度の関係 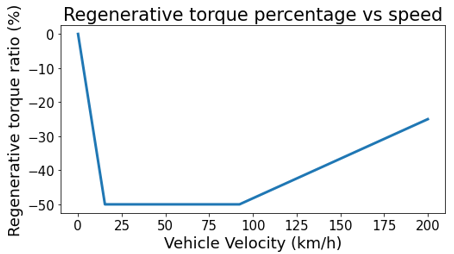
アクセルペダルを完全に解放した場合に停止状態を実現するには、車両速度が0で回生トルクを0に設定します。これは、PWMルックアップテーブルの1つ目のセルの値を惰行を意味する50に設定することによって行われます。
こうすることで、惰行領域と回生トルク比率を直接使用してモーターのトルク比が決定されます。モーターのトルク比は、モーターのトルク利用率であり、次の式によって得られます:
ここで:- : モーターのトルク
- : 速度の関数としてのモーターの最大トルク
トルク比は-100~100の範囲内の値を受け入れることができ、正の値はトラクションモード、負の値は回生制動モードでのモーター動作を示します。
- インバーター / コンバーター
- インバーター / コンバーターブロックの役割は、モーター制御によって実行される周波数変換プロセスに起因する電力損失をモデル化することです。このブロックは、モーターとバッテリーパックの間に位置して、各モーターの最終的な電力需要を提供します。
- バッテリーパック
- バッテリーモデルは、両方のモーターの合計電力需要を受け取ります。このモデルには、バッテリーパックの容量を決定するために必要な情報が含まれています。このモデルは、車両の動作に起因する充電 / 放電損失を指定して、バッテリーの充電状態を推定します。注: このパワートレインモデルの完全なTwin Activate図には、以下からアクセスできます:<install_dir>\ hwdesktop\hw\mdl\mdllib\Common\FMU_Library\Motor\FMU_source\Activate_Models。
MotionViewのパワートレインモデル
MotionViewのMDLシステムでは、モーター、インバーター、バッテリーは、質量および慣性プロパティを含む剛体として表され、これらはBEVの合計の質量および慣性の大部分を占めます。変速機システムの力は、ドライブシャフトにかかる駆動トルクを表します。2つのソルバー変数によって、FMUチャンネルがAltair Driverに接続されています。データセットには、モーターボディのプロパティに関する重要情報が含まれています。さらに、各モーターのブッシュが提供されており、これらによってモーターの位置が決定されます。最後に、Altair Driverはフィードバックコントローラーを使用して速度と加速度を制御します。
- データセット
-
- モータープロパティ
-
リアルタイムのモーター効率計算は、外部の効率マップファイル(.efmp)によって提供される実際のモーターのトルク-速度-効率データに依存しています。このファイルは、モーターのトルク-速度特性曲線とトルク-速度-効率特性曲線を表します。このファイルのパスは、モータープロパティデータセットの入力として受け取られます。
- テンプレート
-
- モータープロパティの評価
- これは、それぞれのシミュレーションの前に内部スクリプト(MotorProperties.py)を初期化する役割を担い、以下の目的で使用されます:
- Teimorbit形式の.efmpファイルを読み取ります。
- モータープロパティを抽出します。
- .xmlファイル固有の.matファイルを生成して、実行フォルダーに保存します。
- FMUパラメータセクションで正しい.matファイルのパス / 変数を割り当てます。
- ソルバー変数
-
エンティティ タイプ 説明 コメント FMU Torque ソルバー変数 リア / フロントモーター出力トルク N-mm FMU Omega ソルバー変数 リア / フロントモーター出力ホイール速度 rad/s Battery SOC ソルバー変数 バッテリーの充電状態 0 - 1 Torque Ratio ソルバー変数 リア / フロントモーター速度トルク使用率 0-100 Vehicle Longitudinal Velocity m/s ソルバー変数 車両の縦速度 m/s Driver Throttle Output アタッチメントソルバー変数 ドライバからのスロットル信号 0-1 Driver Clutch Output アタッチメントソルバー変数 ドライバからのクラッチ信号 モデル内では使用されませんが、ドライバのアタッチメントに必要です。 Driver Gear Output アタッチメントソルバー変数 ドライバからのギア信号 モデル内では使用されませんが、ドライバのアタッチメントに必要です。 - FMUエンティティ
- 入力、出力、パラメータ、ソルバー設定を含むシングルモーター搭載電動パワートレインのFMUを表します。FMUパワートレインの入力はカスタマイズしてシステムを自由に変更できますが、ドライバイベントを正しくシミュレートするには、いくつかの入力と出力が存在する必要があります。以下の表は、FMUパワートレインブロックの必要な入力と出力を示しています。パワートレインは、スロットル、トランスミッション入力シャフト速度、車両速度、および出力トルクを受け取ります。
- FMU入力
-
結合 説明 Units コメント Motor speed 変速機入力シャフト速度 rad/s Vehicle speed 車両の縦速度 m/s MVのmm/sからFMUのm/sへの単位変換が必要です。 Throttle from driver ドライバからのアクセルペダルの入力 0-100 MVの0~1からFMUの0~100への単位変換が必要です。 - FMU出力
-
結合 説明 Units コメント Torque from motor モーターの出力トルク N-m FMUのN-mからMVのN-mmへの単位変換が必要です。 Motor speed output モーターのシャフト速度 rad/s Traction Coast Regen State モーターの動作モードを示す整数値:-1はパワートレインが回生制動モードにあることを示し、0はパワートレインが惰行帯にあることを示し、1はモーターがトラクション領域で動作していることを示します。 -1, 0, 1 PWM value モーターに適用される電圧に変換可能なパルス幅変調値に相当します。 0-250 Battery SOC バッテリーの充電状態 0 - 1 Battery power demand モーターからのバッテリー電力需要 W Motor efficiency モーターの効率 0 - 1 Torque ratio モーターのトルク比 0 - 100 - FMU Parameters
-
パラメータ 説明 Units max_pwm 最大PWM値 pwm_zero_torque 0トルク出力に対応するPWM値 matfilename 警告: このパラメータは自動的に更新されるため、手動で変更しないでください。モーターの.matファイルのフルパスを参照します。FMUに複数回表示されます。 matvarname 警告: このパラメータは自動的に更新されるため、手動で変更しないでください。データ抽出用に使用される.matファイルの変数名を参照します。FMUに複数回表示されます。 pedal_0_regen_percent 1-4 これらのパラメータは、制動全体に対する回生制動の寄与比率を速度の関数として定義します。具体的には、図7の3つのセクションを決定する回生制動の比率を指定できます。 pedal_0_vx 1-4 これらのパラメータは、特定の回生制動比率における対応する速度を指定します。具体的には、これらのパラメータを使用して、図7の3つのセクションを指定する速度値を定義します。 traction_max 使用可能な最大トルクの比率 N-m traction_gamma トラクション領域のスロットルとトルク比との相関関係を定義する多項式次数 max_pedal 最大スロットル値 0-100 regen_psi 回生領域のスロットルとトルク比との相関関係を定義する多項式次数 coast_ch pclとpcuの値を定義する惰行の範囲 coast_phi 惰行が必要となるペダル値 coast_m 惰行領域を決定する多項式次数 max_vehicle_speed 車両の最大速度 m/sec battery_discharging_losses トラクション領域においてバッテリー放電損失を決定するための係数 SOC_initial 初期充電状態レベル(%) num_modules_pack_series モジュールパック列の数 num_cells_per_module_series モジュールあたりのセル列の数 nominal_voltage_cell セルの公称電圧 V battery_charging_losses 回生領域においてバッテリー充電損失を決定するための係数 capacity_cell セルの容量 アンペア-時間 num_cells_per_module_parallel 並列モジュールあたりのセル数 num_modules_pack_parallel 並列モジュールパックの数 SOC_limit_high SOCの上限 SOC_limit_low SOCの下限 Path char 警告: このパラメータは自動的に更新されるため、手動で変更しないでください。モーターの特性(定格速度、最大速度、定格トルクなど)を含むmatファイルのパス emotor_efficiency_scale 効率のスケーリングを有効にするためのパラメータ inverter_efficiency インバーターの効率値 converter_efficiency コンバーターの効率値
- モーターシステム
- 統合型モーター-インバーターユニットを搭載しています。
- ボディ
- Motor/Engine - 非動作状態の各モーターの集中質量と慣性を表します。モーターの出力シャフトは、変速機入力シャフトと固く連結されていると見なされるため、それらの速度は同じになります。モーターのシャフトとその回転はモデル化されません。回転シャフトの慣性はモデル化されないため、この慣性は駆動系の他の回転要素に追加できます。
- モーターマウント
- モーターは4つのブッシュによってシャーシに接続されています。マウント位置は、マウントの座標と各マウントに対応するベクトルを使用して指定されたブッシュの向きを指定することで、アタッチメントボディ上に設ける必要があります。
- ソルバー変数
-
エンティティ タイプ 説明 コメント FMU Torque ソルバー変数 FMUからのモーター出力トルク N-mm FMU Omega ソルバー変数 FMUからのモーター出力ホイール速度 rad/s Throttle input to motor 100 ソルバー変数 ドライバからのスロットル入力 0-100 FMU Power demand motor ソルバー変数 モーターの電力出力 W Traction/Coast/Regen state ソルバー変数 モーターの動作モードを示す整数値:-1はパワートレインが回生制動モードにあることを示し、0はパワートレインが惰行帯にあることを示し、1はモーターがトラクション領域で動作していることを示します。 -1, 0, 1 PWM value ソルバー変数 リアモーターに適用される電圧に変換可能なパルス幅変調値に相当します。 0-250 Motor Efficiency ソルバー変数 モーターの効率 0-1
- 変速機システム
-
- ボディ
- Gearbox – 非動作状態の変速機ボディの質量および慣性プロパティが含まれます。変速機は、固定ジョイントを使用してモーターボディに直接接続されていると想定されます。モーターの出力シャフトは、変速機入力シャフトと固く連結されていると見なされるため、それらの速度は同じになります。
- データセット
-
- 変速機データ
-
ラベル 説明 Final Drive Ratio ディファレンシャルの最終減速比であり、最終的な駆動トルクの計算に使用されます。 Gearbox Efficiency 変速機の全体的な効率であり、最終的な駆動トルクの計算に使用されます。
- ソルバー変数
-
エンティティ タイプ 説明 コメント Torque from Gear Box ソルバー変数 変速機の最終的な出力トルクの計算に使用される数式。 N-mm Gear Box Input Shaft Speed ソルバー変数 変速機の入力シャフト速度の計算に使用される数式。 rad/s - 力
- Gearbox Output Torque - ディファレンシャルのキャリアボディ上のパワートレインの出力トルクを表します。このトルクは、‘Torque from Gear Box’というソルバー変数式によって計算されます。
- バッテリーパックシステム
- Assembly Wizardでバッテリーパックモジュールを選択した場合、バッテリーパックモジュールは、プライマリのデュアルモーター搭載パワートレインシステムとは別個のシステムとなります。これには以下が含まれます:
- ボディ
- Battery Pack - ボディの質量および慣性プロパティを表します。
- バッテリーマウント
- バッテリーは4つのブッシュによってシャーシに接続されています。マウント位置は、マウントの座標と各マウントに対応するベクトルを使用して指定されたブッシュの向きを指定することで、アタッチメントボディ上に設ける必要があります。
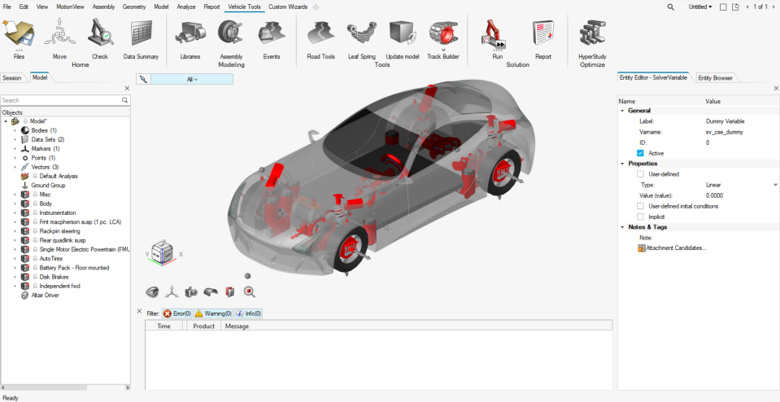
フルビークルモデルの電動パワートレインへのアクセス
- Vehicle Tools拡張機能を読み込む必要があります。
- メニューバーからを選択します。
- Loadボタンを右側にスライドして、Vehicle Tools拡張機能を読み込みます。MotionViewにVehicle Toolsページが追加されます。
図 9. 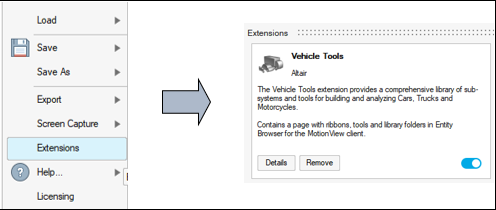
- Vehicle Toolsリボンで、AssemblyツールをクリックしてAssembly Wizardを開きます。
- Full Vehicle with Driverモデルを選択して、Nextをクリックします。
図 10. モデルタイプの選択 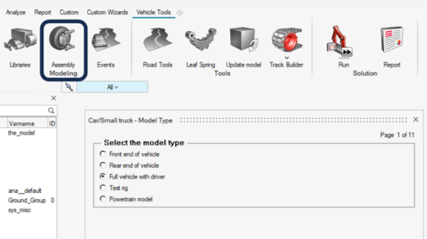
- FrontまたはRear wheel
driveのドライブライン構成を選択してから、PowertrainドロップダウンメニューにあるSingle Motor
Electric Powertrain (FMU)を選択します。
図 11. 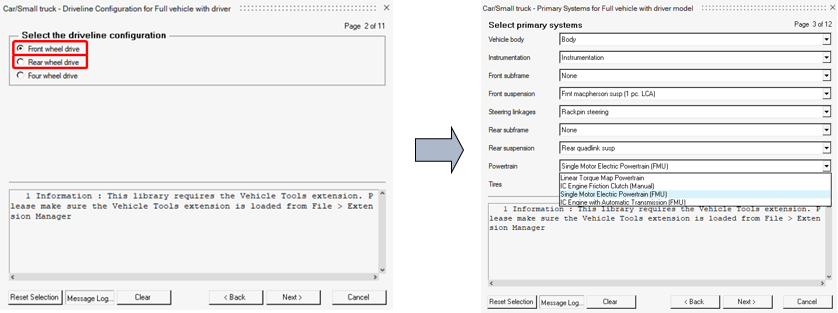
- 車両のパワートレインタイプを選択したら、バッテリーパックボディも選択できます。
図 12. 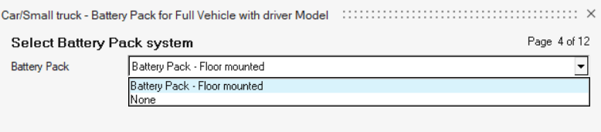
FMUパワートレインの変更
FMUのパラメータセクションでパラメータを調整することで、デフォルトのパワートレイン仕様を特定の要件に合わせて簡単にカスタマイズできます。主な変更可能パラメータは、スロットル応答、制動全体に対する回生制動の寄与比率、バッテリーの容量です。車両の動作のパラメータ化は、主にモーター仕様と回生制動に関する2つのセクションに分けられています。
$---------------------------------------------------------------------ALTAIR_HEADER
[ALTAIR_HEADER]
FILE_TYPE = 'efmp'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$--------------------------------------------------------------------------UNITS
[UNITS]
(BASE)
{length force angle mass time}
'm' 'newton' 'degrees' 'kg' 'sec'
(USER)
{unit_type length force angle mass time conversion}
'rpm' 0 0 1 0 -1 6.0
'torque' 1 1 0 0 0 1.0
$-------------------------------------------------------------------------Motor Details
[EFFICIENCY_MAP]
(X_DATA)
{speed}
+0.000000E+00
+8.537861E+01
+3.415145E+02
+7.684075E+02
+1.366058E+03
+2.134465E+03
+3.073630E+03
+4.183552E+03
+5.728759E+03
+7.273966E+03
+8.819173E+03
+1.036438E+04
+1.190959E+04
+1.345479E+04
+1.500000E+04
$-------------------------------------------------------------------------Efficiency
(YZ_DATA)
{a b c d e f g h i j k l m n o p}
+0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00 +0.000000E+00
+1.218756E+00 +0.000000E+00 +8.323871E-01 +8.348879E-01 +8.207778E-01 +7.975356E-01 +7.686840E-01 +7.357196E-01 +6.984794E-01 +6.564586E-01 +6.174752E-01 +5.872302E-01 +5.100155E-01 +4.613040E-01 +4.190096E-01 +3.827032E-01
+4.875026E+00 +0.000000E+00 +8.814608E-01 +9.318992E-01 +9.365690E-01 +9.319987E-01 +9.231622E-01 +9.104752E-01 +8.949006E-01 +8.728267E-01 +8.505602E-01 +8.328031E-01 +8.007164E-01 +7.678712E-01 +7.359362E-01 +7.055424E-01
+1.096881E+01 +0.000000E+00 +8.376550E-01 +9.363595E-01 +9.546854E-01 +9.582281E-01 +9.565427E-01 +9.522109E-01 +9.459273E-01 +9.365793E-01 +9.269542E-01 +9.121204E-01 +8.934734E-01 +8.735761E-01 +8.534340E-01 +8.334711E-01
+1.950010E+01 +0.000000E+00 +7.779298E-01 +9.228859E-01 +9.543095E-01 +9.639408E-01 +9.664942E-01 +9.656404E-01 +9.628304E-01 +9.575883E-01 +9.519336E-01 +9.419017E-01 +9.290871E-01 +9.152123E-01 +9.008979E-01 +8.863836E-01
+3.046891E+01 +0.000000E+00 +7.155875E-01 +9.027567E-01 +9.474120E-01 +9.628555E-01 +9.686488E-01 +9.702265E-01 +9.695124E-01 +9.667733E-01 +9.626870E-01 +9.544688E-01 +9.441605E-01 +9.329200E-01 +9.210782E-01 +9.086153E-01
+4.387523E+01 +0.000000E+00 +6.563856E-01 +8.792230E-01 +9.373423E-01 +9.584760E-01 +9.673843E-01 +9.709935E-01 +9.718605E-01 +9.707183E-01 +9.671191E-01 +9.594001E-01 +9.499134E-01 +9.392034E-01 +9.267406E-01 +9.036660E-01
+5.056248E+01 +0.000000E+00 +6.314770E-01 +8.682518E-01 +9.322428E-01 +9.559373E-01 +9.662057E-01 +9.706858E-01 +9.721578E-01 +9.716095E-01 +9.679095E-01 +9.601471E-01 +9.505474E-01 +9.390330E-01 +9.168608E-01 NaN
+5.919049E+01 +0.000000E+00 +6.030777E-01 +8.548915E-01 +9.257981E-01 +9.525703E-01 +9.644708E-01 +9.699594E-01 +9.721433E-01 +9.722637E-01 +9.681889E-01 +9.601339E-01 +9.496912E-01 +9.281723E-01 NaN NaN
+7.075054E+01 +0.000000E+00 +5.703066E-01 +8.382680E-01 +9.174994E-01 +9.480588E-01 +9.619707E-01 +9.686980E-01 +9.717496E-01 +9.726024E-01 +9.676793E-01 +9.586062E-01 +9.380106E-01 NaN NaN NaN
+8.699840E+01 +0.000000E+00 +5.315730E-01 +8.168210E-01 +9.063657E-01 +9.418017E-01 +9.583267E-01 +9.666546E-01 +9.708084E-01 +9.720695E-01 +9.655065E-01 +9.453839E-01 NaN NaN NaN NaN
+1.114960E+02 +0.000000E+00 +4.823827E-01 +7.864047E-01 +8.898433E-01 +9.321732E-01 +9.524598E-01 +9.630950E-01 +9.688285E-01 +9.694182E-01 +9.487760E-01 NaN NaN NaN NaN NaN
+1.540854E+02 +0.000000E+00 +4.040688E-01 +7.291549E-01 +8.564716E-01 +9.117700E-01 +9.393322E-01 +9.544374E-01 +9.631752E-01 +9.458014E-01 NaN NaN NaN NaN NaN NaN
+2.104600E+02 +0.000000E+00 +3.119294E-01 +6.435543E-01 +8.010837E-01 +8.758160E-01 +9.149455E-01 +9.372630E-01 +9.507810E-01 NaN NaN NaN NaN
$-------------------------------------------------------------------------ENGINE
[TORQUE_CURVE]
(DATA)
{speed torque}
+0.000000E+00 +2.104599E+02
+8.537861E+01 +2.104600E+02
+3.415145E+02 +2.104600E+02
+7.684075E+02 +2.104600E+02
+1.366058E+03 +2.104600E+02
+2.134465E+03 +2.104600E+02
+3.073630E+03 +2.104600E+02
+4.183552E+03 +2.104600E+02
+5.728759E+03 +1.540854E+02
+7.273966E+03 +1.114960E+02
+8.819173E+03 +8.699840E+01
+1.036438E+04 +7.075054E+01
+1.190959E+04 +5.919049E+01
+1.345479E+04 +5.056248E+01
+1.500000E+04 +4.387523E+01
+1.500000E+04 +0.000000E+00
トラクション領域内のスロットル応答は、 traction_gammaとtraction_maxの2つの主要パラメータの影響を受けます。正しく設定することにより、円滑さと応答性の適切なバランスが得られます。これらの設定を微調整すると、これら2つの要素の望ましいバランスが確保され、運転エクスペリエンスを向上させることができます。
関連するパラメータを操作することで、車両の回生制動量を決定することもできます。回生制動量を求める式は、1によって得られます。 回生制動の配分率は、デフォルトでは60-40(フロント-リア)に固定されています。モーターのトラクション、惰行、回生の各領域のマッピングは、1で詳述されています。 車両の惰行境界‘ ’および‘ ’は、パラメータ‘ ’,’、‘ ’、‘ ’、および車両の最大速度‘ ’によって定義されます。車両の速度別の回生量は、ルックアップテーブルとして使用されるマップによって決定されます。‘ ’と‘ ’は、速度と回生制動のマッピングのためのパラメータです。最後に、‘ ’は、スロットルと出力トルク間の相関関係の定義に使用されます。
制限事項
- モーターのシャフトの回転慣性は、駆動系の回転体に追加する必要があります。
- デフォルトのモーター構成では、効率マッピングの点においては、モーターの回生領域はトラクション領域と同じであると想定されています。