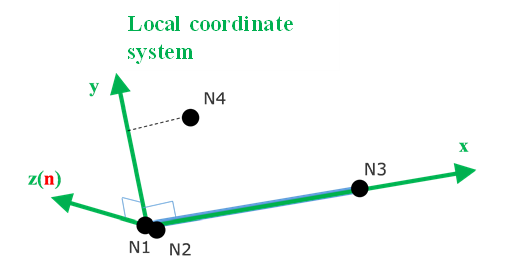
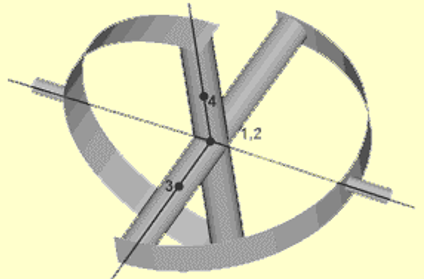
スプリングの局所座標系
図 1.
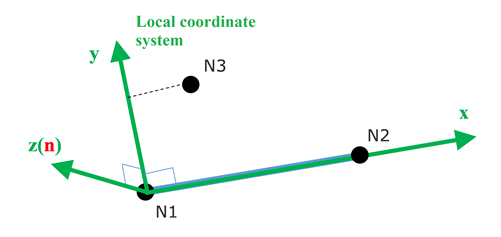
スプリング要素は、局所座標系が定義された
/SPRINGを使用して定義します(
図 1)。
- 局所
方向: 節点N1から節点N2に向かう方向
- 局所
平面: N1、N2、N3によって定義される平面(1自由度のスプリングの場合、N3は省略可能であり、3自由度のスプリングでN3が未定義の場合は、適切な全体軸が使用されます)。
- 局所
方向: N1を始点とし、
平面に対して垂直。
- 局所
方向:
(
軸と
軸の外積)。
スプリングのタイプは、/PARTを通じてそのスプリングに割り当てられたプロパティによって決まります。
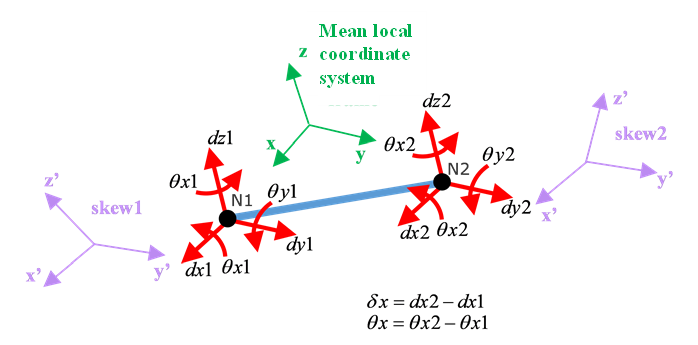
力計算のためのスプリングの座標系
- プロパティ/PROP/TYPE4 (SPRING)、/PROP/TYPE32 (SPR_PRE)、/PROP/TYPE35 (STITCH):
これらのスプリングはすべて1自由度を有しており、力はスプリングの局所
方向で計算されます。
- プロパティ/PROP/TYPE8 (SPR_GENE):
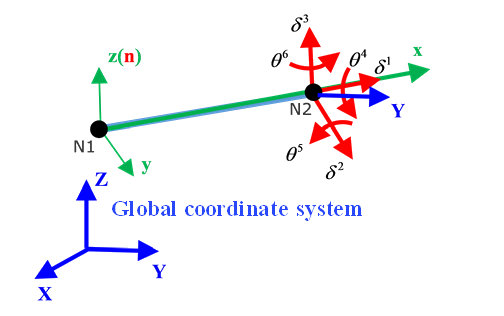
力とモーメントは、全体座標系から計算されるか、ユーザー指定のスキュー内で計算されます。このスプリングでは、6自由度が計算されます。
- スキューが定義されていない場合、全体座標系が使用されます。図 2. プロパティTYPE8で使用される全体座標系

- スキューが定義されている場合、自由度ではスキューが次のように使用されます:図 3. プロパティTYPE8で使用されるスキュー

- プロパティ/PROP/TYPE13 (SPR_BEAM)、/PROP/TYPE25 (SPR_AXI)、/PROP/TYPE44 (SPR_CRUS):
これらのプロパティでは、元の局所座標系、スキューで更新された局所座標系、または全体座標系を使用できます。局所
方向は、常に節点N1からN2への方向です。入力に応じて、
方向は、節点N3、スキュー、または全体座標系によって決定できます。最後に、
方向が更新され、平面
に対して垂直になります。
- 局所
方向:節点N2から節点N2に向かう方向です。
- 局所
方向:
- N3が定義されている場合、
方向は、N1、N2、N3によって定義される平面に対して垂直になります。これら3つの節点は一直線に並んでいてはいけません。
- N3は定義されていないが、スキューが定義されている場合、
(
はスキューからの方向)となります。
- N3とスキューが定義されていない場合、
(Yは全体座標系からの方向)となります。
-
方向:
方向は、平面
に垂直になるように計算され、
です。 図 4. スキュー座標系の使用
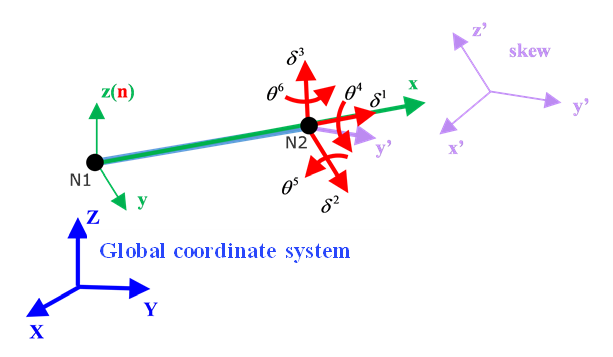
図 5. 全体座標系の使用
- プロパティ/PROP/TYPE45 (KJOINT2):
各ジョイントタイプについて、節点N1と節点N2を使用してジョイント自体が定義されます。節点N1と節点N2は剛体以外にも結合できるようになりました。節点N1とN2は一致していなくてもかまいませんが、ジョイントのよりよい挙動のためには、初期状態で節点位置は一致している事を強く推奨します。オプションの節点である節点N3と節点N4は、ジョイントの両側の局所座標系を定義するために使用されます。最初は、これらの座標系は一致しています。ジョイントの挙動は、これらの局所座標系の相対的な動き / 回転によって決定されます。
図 6.
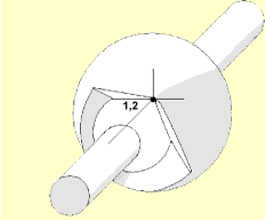
球ジョイントの節点N1とN2は、できれば一致させてください。剛体ジョイントは、節点N1とN2によって表現できます。全体座標系を使用して、局所座標系の初期方向が定義されます。
| タイプ番号 |
ジョイントタイプ |
dx |
dy |
dz |
|
|
|
| 1 |
球 |
x |
x |
x |
0 |
0 |
0 |
| 8 |
剛性 |
x |
x |
x |
x |
x |
x |
x: 固定自由度を示します。
0: フリー自由度(ユーザー定義)を示します。
図 7. 球ジョイント
回転、円筒、並進ジョイントでは、節点N3を使用して、ジョイントの局所座標系の第1軸が定義されます。N3が指定されていない場合、節点N1とN2を結ぶ線を使用してジョイントの軸が定義されます。この場合、節点N1とN2は同じ位置にあってはいけません。
| タイプ番号 |
ジョイントタイプ |
dx |
dy |
dz |
|
|
|
| 2 |
回転 |
x |
x |
x |
0 |
x |
x |
| 6 |
並進 |
0 |
x |
x |
x |
x |
x |
| 3 |
円筒 |
0 |
x |
x |
0 |
x |
x |
x: 固定自由度を示します。
0: フリー自由度(ユーザー定義)を示します。
図 8. 球ジョイントと並進ジョイント
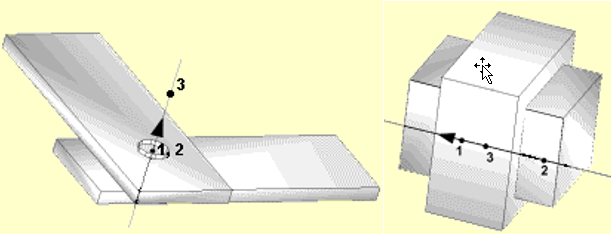
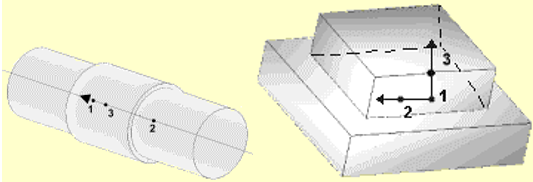
図 9. 円筒ジョイントと平面ジョイント
ユニバーサル、フリー、平面ジョイントでは、節点N3とN4を使用して、ジョイントの局所座標系の第1軸と第2軸が定義されます。
| タイプ番号 |
ジョイントタイプ |
dx |
dy |
dz |
|
|
|
| 4 |
平面 |
x |
0 |
0 |
0 |
x |
x |
| 5 |
ユニバーサル (開発ソースのみ) |
x |
x |
x |
x |
0 |
0 |
| 9 |
フリー |
0 |
0 |
0 |
0 |
0 |
0 |
x: 固定自由度を示します。
0: フリー自由度(ユーザー定義)を示します。
図 10. ユニバーサルジョイント
ジョイントプロパティが等方性でない(ブロックされていないそれぞれの自由度において異なる剛性、摩擦、または減衰)場合、局所座標系の完全な定義が必要になります。この場合、局所座標系の第1軸は節点N3、局所座標系の第2軸は節点N4によって定義され、第3軸は自動的に計算されます。
スキュー定義に応じて、
/PROP/TYPE45 (KJOINT2)によって力とモーメントが計算されます。
-
- スプリングの局所座標系を使用します。
-
- Skew_ID1を使用します:
-
- 平均局所座標系を使用します。
-
と
のx軸は平行である必要があります。
-
- まず、
内の全体座標系を設定します。
- 次に、平均局所座標系を使用します。
図 11. KJOINT2プロパティの自由度