Pulse Steer
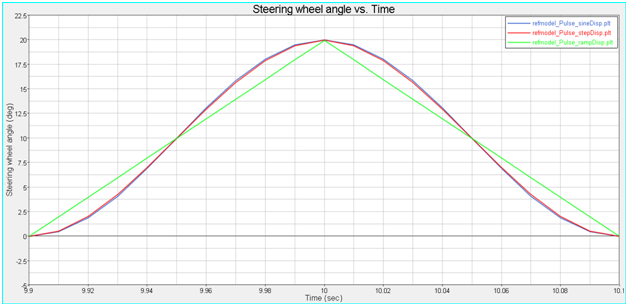
Pulse steerイベントは、直線上を一定速度で走行中に発生するハンドルへの突然のパルス入力に対して、車両がどのように応答するかをシミュレーションします。イベントへの入力はハンドルへのトルクの場合も角度の場合もあります。ユーザーはパルス振幅とパルス幅を設定できます。パルスは、sine、step、またはramp関数として入力でき、ユーザーはその幅を制御できます。駆動トルクコントローラーを使用して、車両を一定速度に維持します。また、タイヤシステムと出力リクエストシステムには、車両とタイヤの標準出力が組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
このイベントは、MotionView Assembly Wizardを使用して構築したフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。また、イベントのアタッチメント方式に厳密に従っていれば、手動で構築したモデルでもこのイベントを使用できます。
このイベントを使用して、ハンドルへの突然のパルス入力に対する車両の応答を判断します。イベントパラメータは、イベントフォームで入力します。
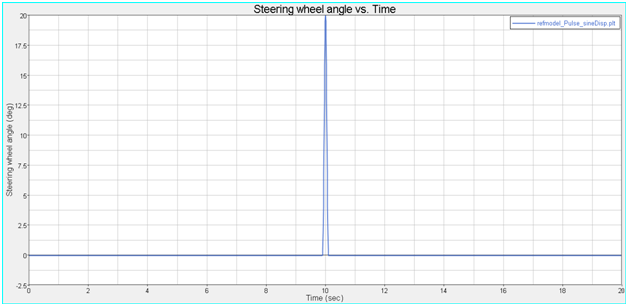
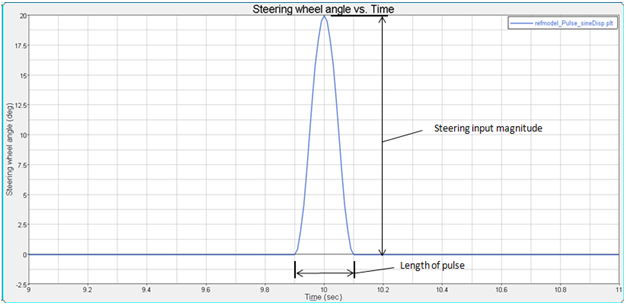
ステアリングホイールの変位
イベントシーケンス
| 時間 | 説明 | 目的 |
|---|---|---|
| 0 | 静解析 | 車両を地面に固定しホイールをハブに固定して行う、静的解析。 |
| 0+ | ジョイント解放 | 車両を地面に固定している2つのジョイントと、ホイールをスピンドルに固定している4つのジョイントが解放されます。 |
| 0++ | 動解析 | ハンドルが0に固定され、トルクコントローラーが一定速度を維持した状態で、動的イベントが開始します。 |
| 10-1/2 (パルスの長さ) |
パルスの開始 | イベントフォームで指定した方法を使用してパルスイベントが始まります。 |
| 10+1/2 (パルスの長さ) |
パルスの終了 | イベントフォームで指定した方法を使用してパルスイベントが終了します。 |
| 20 | イベントの終了 | イベントが終了します。イベントテンプレートを変更して、終了時間を変更します。 |
- ステアリングパルスの式はイベントテンプレートで定義し、イベントフォームを使用して入力したデータセット値がその式で参照されます。上級ユーザーであれば、テンプレートを編集してイベントを変更できます。
- 当社の調査では、フォース入力より変位入力の方が安定性があることが示されています。
- イベントは、無限に平坦な路面で実行されます。また、道路用グラフィックは表示されません。イベントを見やすくするには、グラフィックを追加します。
参考資料
ISO +7401-2003 – Road Vehicles-Lateral transient response test methods-Open-loop test methods.
Pulse Steerイベントの作成
- Task WizardをクリックしてPulse steer analysisオプションを選択します。
-
Finishをクリックします。
モデルブラウザに新しいデータが入力され、Car/Small truck - Full vehicle tasksダイアログが開きます。
- Vehicle velocity欄の値によって、イベント中に車両が維持する速度が決まります。この欄に値を入力します。
- ドロップダウンメニューでステアリング入力タイプを選択して入力します。角度の場合は、ハンドルにステップの角度を適用します。トルクの場合は、ハンドルにステップのトルクを適用します。
- ステアリング入力の大きさによって、適用されるステアリング入力の大きさ(度またはNewton-mm)が決まります。正の値は左回り、負の値は右回りです。
- パルスの長さを秒単位で入力します。
- イベントのパルス過程で使用する関数タイプを選択します。
- Nextをクリックします。
-
Finishをクリックします。
イベントが作成され、モデルブラウザに表示されます。
-
モデルブラウザで、Data
Setsを展開してFull Vehicle
Dataをクリックします。
パネルにデータセット情報が表示されます。システム内でデータセットが1つ使用され、そのデータセットに、Pulse steerイベントを記述するために使用されるデータが格納されます。このイベントを使用すると、横加速度、円の半径、ステア解放時間、および旋回方向(左または右)を設定できます。初期車両速度、ホイール回転速度および地上高は計算値であり、手動で変更できません。
-
モデルブラウザで、Forcesを展開してSteering Torqueをクリックします。
Forceパネルが表示されます。このモデルのフォースは、ハンドルに適用されます。ハンドルとステアリングコラムが含まれていない場合は、フォースはステアリングギアのインプットシャフトに適用されます。
-
Rot Propertiesタブをクリックします。
フォースは、最初はゼロに定義されています。イベントテンプレートでイベントフォームの入力を使用してフォースを再定義します。
-
モデルブラウザで、Formsを展開してPulse Steer Dataをクリックします。
フォームは、レーンチェンジイベントを変更する必要のある唯一の場所です。変更できるパラメータは、横加速度、円の半径、旋回方向、およびステア解放時間です。地上のZ座標は計算値です。タイヤデータフォームでホイール重心のZ位置とタイヤ転がり半径を使用して計算されます。
-
モデルブラウザで、Jointsを展開してRack Dummy Ball Jointをクリックします。
Pulse steerイベントには球ジョイントが1つ組み込まれています。ジョイントは、ダミーボディをステアリングラックに結合します。ジョイントは、特定のイベントをADAMSで機能させるために含まれています。
- モデルを手動で構築する場合は、パネルを使用してダミーボディをステアリングラックに結合します。
-
モデルブラウザで、Motionsを展開します。
3つのモーションがイベントに組み込まれています。車両に対するステアリングモーションは、ステアコントローラーによって提供され、ステアリングコラムを車体に接合する回転ジョイントに作用します。モデルにステアリングコラムがない場合、このジョイントはステアリングラック入力軸と車体の間で機能します。
前輪と後輪のモーションは、ホイールハブをナックルに結合する、ホイールスピンドルの回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。動解析中にタイヤが回転できるように、静的平衡解析の後、モーションは非アクティブ化されます。
-
Steering Wheel Motionをクリックします。
新しいデータを反映してパネルが更新されます。
- 必要に応じて変更を加えます。
-
モデルブラウザで、Templatesを展開してPulse
steerをクリックします。
このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。テンプレートは、</Model>コマンドの後にソルバーデックに挿入され、イベントの実行を制御します。このイベントのテンプレートを以下に示します。テンプレートには、生成される出力ファイル、実行される一連のイベント用のコマンドと、Pulse Steerイベントシーケンスの作成に使用されるフォース、ジョイント、およびモーション用の実行時コマンドがあります。
<ResOutput angle_type = "YPR" /> <ResOutput mrf_file = "TRUE" /> <ResOutput plt_file = "TRUE" /> <H3DOutput switch_on = "TRUE" increment = "1" /> <ResOutput abf_file = "TRUE" /> <!--Initial static analysis --> <Simulate analysis_type = "Static" end_time = "0.0" /> <Deactivate element_type = "MOTION" element_id = "118002" /> <Deactivate element_type = "MOTION" element_id = "218002" /> <Deactivate element_type = "MOTION" element_id = "118003" /> <Deactivate element_type = "MOTION" element_id = "218003" /> <Deactivate element_type = "JPRIM" element_id = "303001" /> <Deactivate element_type = "JPRIM" element_id = "303002" /> <Deactivate element_type = "FORCE" element_id = "31801" /> <Motion_Joint id = "318001" expr = "IF(TIME-9.9:0,0,IF(TIME-10.1:-10D-(-10D) *COS(2*PI*5*(TIME-9.9)),0,0))" /> <Simulate analysis_type = "Transient" end_time = "20" num_steps = "2000" /> <Stop/>